
搜索结果: 31-45 共查到“知识库 控制科学与技术”相关记录6775条 . 查询时间(0.462 秒)

复杂多变的战场环境要求后装保障能够根据战场环境变化,预见性地做出决策.为此,提出基于强化学习的动态调度方法.为准确描述保障调度问题,提出支持抢占调度、重分配及重部署决策的马尔科夫决策过程(Markov decision process,MDP)模型,模型中综合考量了任务排队、保障优先级以及油料约束等诸多问题的影响;随后设计改进策略迭代算法,训练基于神经网络的保障调度模型;训练后的神经网络模型能够近...
六轮野外机器人通常体积庞大,难以建立其动力学模型.采用传统的速度控制方法很难保证机器人的横向稳定性.为解决这一问题,开展基于分层控制策略的六轮滑移机器人横向稳定性控制研究.首先分析整车受力情况,建立六轮滑移机器人的动力学模型.其次,设计基于分层控制策略的动力学控制器,其中上层为基于改进趋近律的滑模控制器,实现对期望横摆角速度的跟踪;下层为基于附着率最优的转矩分配控制器,该控制器可以保证机器人行驶的...
基于改进YOLOX的移动机器人目标跟随方法
移动机器人 YOLOX 重识别 目标跟随
<
2024/1/16
针对移动机器人在复杂场景中难以稳定跟随目标的问题,提出基于改进YOLOX的移动机器人目标跟随方法,主要包括目标检测、目标跟踪以及目标跟随三个部分.首先,以YOLOX网络为基础,在其框架下将主干网络采用轻量化网络MobileNetV2X,提高复杂场景中目标检测的实时性.然后,通过改进的卡尔曼滤波器获取目标跟踪状态并采用数据关联进行目标匹配,同时通过深度直方图判定目标发生遮挡后,采用深度概率信息约束及...
基于讨价还价博弈机制的B-IHCA* 多机器人路径规划算法
多机器人 路径规划 讨价还价博弈 解耦/协作
<
2024/1/16
针对密集场景中大规模冲突导致多机器人路径规划(Multi-agent path finding,MAPF)成功率低的问题,引入讨价还价博弈机制并以层级协作A*(Hierarchical cooperative A*,HCA*)算法为内核,提出一种基于讨价还价博弈机制的改进层级协作A*(Bargaining game based improving HCA*,B-IHCA*)算法.首先,在HCA*算...
基于辅助信息补偿和控制信号编码的重放攻击检测方法
信息物理系统 重放攻击 攻击检测 控制信号编码
<
2024/1/16
向最优控制信号中加入编码信号是实现信息物理系统(Cyber physical system,CPS)重放攻击检测的有效方法,但会造成系统控制性能的损失.如何在保证重放攻击检测率条件下降低系统的控制性能损失是一个值得研究的问题.为此,提出一种基于辅助信息补偿的控制信号编码检测方法,通过向测量值添加辅助信号补偿控制编码信号对最优状态估计的影响.首先,证明了此方案下重放攻击的可检测性,导出检测率的上界与...
基于改进扩展状态观测器的液压锚杆钻机滑模摆角控制
液压锚杆钻机 滑模控制 扩展状态观测器 自适应律
<
2024/1/16
液压锚杆钻机摆角系统固有的死区、干扰和时变参数严重影响其动态和稳态性能.为解决该问题,通过融合动态面方法、滑模方法和扩展状态观测器,提出一种基于改进非线性扩展状态观测器的液压锚杆钻机自适应滑模摆角控制方法.首先,引入一种死区补偿方法,建立摆角系统的死区补偿模型.其次,为提高系统的抗扰动能力和抑制噪声,设计一种改进的非线性扩展状态观测器.此外,构造一种自适应滑模控制律,这其中,基于性能函数和动态面方...
低压双极性直流微网故障自恢复的模糊控制方法
低压双极性 直流微网 自恢复控制 故障检测
<
2024/3/11
为了提高低压双极性直流微网故障检测和诊断能力,研究了低压双极性直流微网故障自恢复控制方法。首先提取低压双极性直流微网故障特征,分析低压双极性直流微网的输出稳定性特征,估计直流微网故障自恢复参数。再对低压双极性直流微网故障控制参数优化求解,根据参数求解结果,进行故障自恢复控制的状态寻优。通过直流多馈入误差补偿方法进行低压双极性直流微网故障自恢复的模糊控制,在此基础上进行参数辨识及收敛性控制,以此提高...
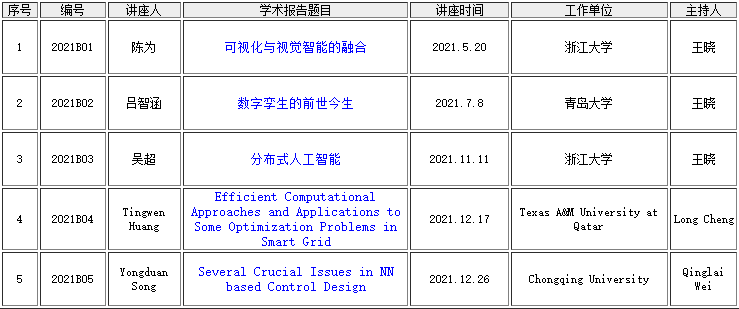
中国科学院自动化研究所复杂系统管理与控制国家重点实验室2021年系列讲座。

中国科学院自动化研究所复杂系统管理与控制国家重点实验室2022年系列讲座。
针对含有推进器故障和状态测量不确定的无人艇(Unmanned surface vehicle,USV)系统,提出一种基于双扰动观测器的固定时间容错跟踪控制(Double disturbance observer-based fixed-time fault-tolerance control,DDO-FxFC)方法.设计两个固定时间扰动观测器,分别估计状态测量不确定性产生的非匹配干扰和包含推进器故...