
�������: 1-9 ���鵽�����ƿ�ѧ�뼼�� �����ɶ�����ؼ�¼9�� . ��ѯʱ��(0.137 ��)
�й���ѧԺ�����Ƚ������о�Ժר���������ɶ�����������
�й���ѧԺ�����Ƚ������о�Ժ ר�� �����ɶ� ����������
<
2023/11/28
�й���ѧԺ�����Ƚ������о�Ժר���������ɶ�����������

�й���ѧԺ�������ϼ����빤���о��������ɶ������������о�ȡ�ý�չ��ͼ��
�й���ѧԺ�������ϼ����빤���о��� �����ɶ� ����������
<
2017/12/27
�й���ѧԺ�������ϼ����빤���о����Ƚ����켼���о��������˶����Ƚ��������Ŷ������з��ĸ��ٸ߾����������ˣ��������3T1R������ƽ��һ��ת�����ĸ����ɶ����˶���ʵ���������ɶ����������˵Ĺ��ʹ��¡��ڻ�����������ϣ������˶��ص�M��4-2-1��������������ƣ��ṹ���պá����ĵͣ���Ч�����ϵͳ�ĸնȺ��ȶ��ԡ��о��Ŷ�ͨ�������˶�ѧ���Է��������ָû������м�����������˶�ѧ����㷨������������ϣ�...
�й���ѧԺ�������ϼ����빤���о��������ɶ������������о�ȡ�ý�չ��ͼ��
�й���ѧԺ�������ϼ����빤���о��� �����ɶ� ����������
<
2017/12/18
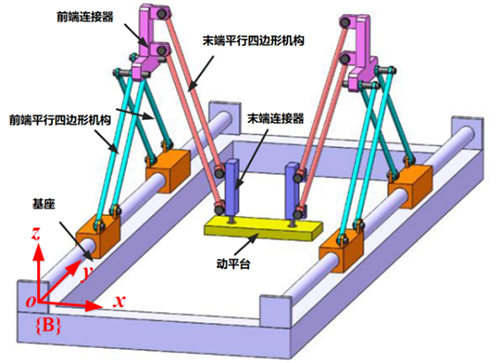
�й���ѧԺ�������ϼ����빤���о����Ƚ����켼���о��������˶����Ƚ��������Ŷ�������Ƶ������ɶ����������ˣ�����ʵ��3T1R�ĸ����ɶ����˶����������ɶ����������˵Ĵ������֮һ������Ҫ�ص�Ϊ2����֧ͬ��ͨ������ת�������ӵ���ƽ̨�ϣ���ÿ��֧����2����ͬ��֧ͨ����װ�ڻ����ϵ��ƶ�����Ϊ������Ϊ��һ�����������ص㣬��������������֤�˸û������ɶ�����Ŀ���������˶�ѧ���ԣ��õ�����λ�õķ�ս⣬���ݻ�������...
һ�־�����ת����һ�ƶ��������ɶ����������˻���
���� ������
<
2008/10/6
�÷�����Ҫ����ļ��������ǣ��ṩһ�־�����ת����һ�ƶ��������ɶ����������˻������û��������ڲ��������ˡ������������������˵ȳ��ϡ��û����ɹ̶�ƽ̨�Ͷ�ƽ̨�����Ӷ�ƽ̨�̶�ƽ̨�������˶�֧����ɡ������˶�֧���Ľṹ��ͬ��ÿ���˶�֧�����˶������С��û������нṹ���������ɱ��͡������ռ�Գơ������ڶ踱�Լ��˶�ȷ�����ŵ㡣
����ʽ�����ɶ���λƽ̨������
�������� ������ ���ؿ���
<
2008/7/28
�����һ��Ӧ����ɨ��羵�������ɶ�������λƽ̨.��ƽ̨�ṹ�����ڼ�������װ�ú�ʵ���ṹ���������.Ϊʹ����ƵĶ�λƽ̨���иߵĶ�λ���ȣ�������ƽ̨�����ʸ��ģ��.ͨ��ģ������ֶη����˽ṹ������ƽ̨��֧�ֲ���ƽ̨ĩ�˶�λ���ȵ�Ӱ�죬�������ڴ��غ������»����ڷ����ɶ���������Ľ�λ�����.
����ʽ�����ɶ���λƽ̨�����Ż�
�������� �ռ�ߴ�ģ�� ����ͼ�� �Ż�
<
2008/7/28
Ϊ����չɨ��羵����;��ʵ���ṹ��������⣬���Ļ���4��PUU�������������һ��ɨ��羵��λƽ̨����ṹ�����ڼ�������װ�ã�Ϊ�Ż�ƽ̨���������ܣ����Ľ�����4��PUU�����Ŀռ�ߴ�ģ�ͣ������˻�������ͼ�ף������˻��������Ի����ɴ﹤���ռ䡢�����ԡ��ٶ����ܵ�Ӱ�죬�õ��˾����������ܵ�ƽ̨����������
˫�������ɶ��ռ�����˲�δ֪Ŀ��IJ�����ʶ
������ʶ δ֪Ŀ�� ˫�������ɶ� �ռ������
<
2008/7/14
������˫�������ɶ��ռ�����˲�δ֪Ŀ��IJ�����ʶ�������÷��������߶����ͽǶ����غ㶨�ɣ��Ƴ��˻�е�۸���δ֪Ŀ����µ�ĩ��ЧӦ�������������ĺ�ת�������ķ�����. ���߲�������е���˶�ʱ�ı�������ٶȺͽ��ٶȣ�����÷���������Щδ֪�Ĺ��Բ�������ֵ������ʾ�˸÷�������Ч�ԣ�
һ�־�������λ���ȵ������ɶ���ƽ̨������
������ ѹ���մ����� װ�� ����
<
2008/7/14
���Ľ����˲���ѹ���մɹ���Ϊ�������������ɶ����ƶ�ƽ̨�Ľṹ��ơ��˶���
��������ϵͳ�Ķ�̬���Խ����˷�����̽�֣�����������ƽ̨�ڲ�ͬ���ء���ͬ���ʽ�
���Ͻ��������飬������������������ƽ̨�����ƶ���Χ�㡢���Ƽ�����ɵ�������
�ϴ���֧���������ص㣬��ʵ��֤������ϵͳ�����õ��ƶ������ǿ��еģ�
һ�������ɶ���������������������궨����
�������� ���ģ�� �˶�ѧ�궨 �Ż�
<
2008/7/10
���һ�������ɶ����������������˶�ѧ�������ڴ˻��������㶯�������������ģ�ͣ���ȷ�˸����Դ��ĩ��λ�˵�Ӱ�죮�ڶԲ��������ı궨�������м��ܺ�˵���˶Ըû������ģ���еĻ����������б궨�����ַ����������˱궨װ�á��궨�㷨���궨���̣�������Matlab�Ի������ı궨���������˷��棬���Է����������˷�����
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...