
搜索结果: 1-2 共查到“知识要闻 控制科学与技术 四自由度”相关记录2条 . 查询时间(0.191 秒)

中国科学院宁波材料技术与工程研究所四自由度并联机器人研究取得进展(图)
中国科学院宁波材料技术与工程研究所 四自由度 并联机器人
<
2017/12/27
中国科学院宁波材料技术与工程研究所先进制造技术研究所精密运动与先进机器人团队最新研发的高速高精并联机器人,可以完成3T1R(三个平动一个转动)四个自由度的运动,实现了少自由度并联机器人的构型创新。在机构构型设计上,采用了独特的M型4-2-1并联机构构型设计,结构紧凑好、重心低,有效提高了系统的刚度和稳定性。研究团队通过机构运动学特性分析,发现该机构具有简单的正向和逆向运动学求解算法。在驱动设计上,...
中国科学院宁波材料技术与工程研究所四自由度并联机器人研究取得进展(图)
中国科学院宁波材料技术与工程研究所 四自由度 并联机器人
<
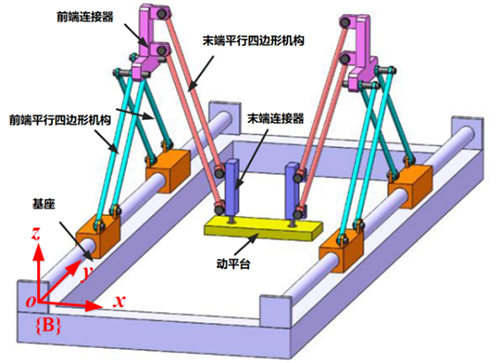
2017/12/18
中国科学院宁波材料技术与工程研究所先进制造技术研究所精密运动与先进机器人团队最新设计的四自由度并联机器人,可以实现3T1R四个自由度的运动,是少自由度并联机器人的创新设计之一,其主要特点为2条相同支链通过被动转动副连接到动平台上,且每条支链有2个相同分支通过安装在基座上的移动副作为驱动。为进一步分析机构特点,采用螺旋理论验证了该机构自由度的数目及机构的运动学特性,得到了其位置的封闭解,根据机构的运...