
搜索结果: 1-15 共查到“知识库 自动控制理论”相关记录928条 . 查询时间(0.588 秒)

燕山大学机械工程学院获国家级奖励项目(图)
燕山大学 机械工程 国家级 奖励项目
<
2024/3/7
燕山大学械工程学院以重型机械及装备为特色,以机械设计及理论、机械电子工程、机械制造及其自动化、材料加工工程等重点学科为基础,不断强化优势学科,积极发展相关学科,在国内具有重要的学术地位和较高的科研水平。近年学院在科研奖励方面取得了令人瞩目的优异成绩,学院教师及团队获得国家自然科学二等奖2项,国家技术发明二等奖2项,国家科技进步一等奖2项,国家科技进步二等奖8项,国家科技进步三等奖1项。
智能网联电动汽车节能优化控制研究进展与展望
智能网联 电动汽车 节能 优化控制
<
2024/1/16
提升纯电动汽车整车能效、降低百公里耗电量,是我国新能源汽车产业发展的重大需求.智能网联背景下,V2X(Vehicle to everything)网联信息以及激光雷达、毫米波雷达、摄像头、定位及导航装置等各类车载传感器,为智能网联电动汽车(Connected automated electric vehicle,CAEV)提供了全方位的信息交互、共享和状态感知能力,赋予了其巨大的节能优化潜力。
针对轧机机电液垂扭耦合系统存在耦合振动问题,提出一种基于耦合反步法的轧机垂扭耦合振动抑制控制策略.首先考虑轧机传动系统、液压系统与辊系机械间的相互影响,根据动力学定理,建立轧机机电液垂扭耦合振动数学模型.其次考虑到轧机耦合垂振系统和耦合扭振系统间存在状态耦合关系,利用耦合反步法,解决了振动控制器设计中存在的相互嵌套问题。
基于扩展PI抗扰补偿器的高精度时间同步控制
扩展PI抗扰补偿器 零极点优化/时间同步 网络控制系统 周期性扰动
<
2024/1/16
高精度时间同步是任务关键型工业网络控制系统的核心支撑技术,针对工业环境中普遍存在周期性振动等扰动信号导致晶振频率漂移,影响时间同步精度的问题,基于扩展比例积分(Proportional integral,PI)观测器,提出一种新型的抗扰补偿器结构,用于消除周期性扰动的影响,并构建了相应的精细抗干扰反馈控制方法,用于实现高精度时间同步。
基于滚动时域强化学习的智能车辆侧向控制算法
滚动时域 强化学习 智能汽车 侧向控制
<
2024/1/16
针对智能车辆的高精度侧向控制问题,提出一种基于滚动时域强化学习(Receding horizon reinforcement learning,RHRL)的侧向控制方法.车辆的侧向控制量由前馈和反馈两部分构成,前馈控制量由参考路径的曲率以及动力学模型直接计算得出;而反馈控制量通过采用滚动时域强化学习算法求解最优跟踪控制问题得到。
中值互补集合经验模态分解
模态分裂 中值算子 互补白噪声 互补集合经验模式分解
<
2024/1/16
针对经验模态分解(Empirical mode decomposition,EMD)系列方法存在的模态分裂(Mode splitting,MS)问题,提出中值互补集合经验模态分解(Median complementary ensemble EMD,MCEEMD)算法.通过概率模型量化互补集合经验模态分解(Complementary ensemble EMD,CEEMD)的MS问题,证明了使用中值算...
PID控制器参数的优化整定方法
PID控制 Tchebyshev多项式 积分滞后模型 跟踪误差平方和 优化整定规则
<
2024/1/16
针对存在临界点的A类被控对象及不存在临界点的B类被控对象,分别采用其−180∘和−120∘相位点的频率和增益提出了PID(Proportional-integral-derivative)控制器参数的优化整定方法.基于Tchebyshev多项式和分数阶积分器求取被控对象−180∘或−120∘相位点的频率...
非线性系统自适应最优切换控制方法
非线性系统 切换控制 自适应最优控制 嵌入转换
<
2024/1/16
针对具有未知动态和M个平衡点的连续时间非线性系统,将线性自适应最优切换控制器和未建模动态补偿器相结合,基于嵌入转换技术和近似动态规划思想,提出一种自适应最优切换控制方法.首先在非线性系统的M个平衡点建立M个线性化模型,当模型参数已知时,提出由线性最优切换控制器、切换准则、未建模动态补偿器以及非线性系统组成的控制系统结构。
非匹配不确定MIMO系统的分数阶终端滑模控制
滑模控制 终端滑模 分数阶滑模 非连续控制
<
2024/1/16
针对一类非匹配不确定多输入多输出(Multi-input multi-output,MIMO)系统提出一种分数阶终端滑模控制(Fractional-order terminal sliding-mode,FOTSM)策略,使系统输出收敛到零而非其邻域.该方法解除传统反步法控制律设计中,虚拟控制增益右伪逆矩阵必须存在的严苛限制;对系统不确定性的假设不局限于慢时变和H2范数有界型扰动,分析控制增益存在...
基于黎曼度量的一类反馈控制系统性能监测与诊断
性能监测 黎曼度量 性能诊断 故障定位
<
2024/1/16
针对复杂工业系统对性能衰退的容忍度低等问题,提出基于系统性能预测的一类反馈控制系统过程监测方法,通过黎曼度量对控制性能衰退程度进行预测与监测,并给出发生故障的类型,以提升过程监测系统的实时性与准确性.首先,利用系统的实时数据,计算系统性能衰退的预测指标;其次,利用黎曼度量对系统性能衰退程度进行预测与监测,并利用随机算法给出对应的阈值来诊断系统性能衰退;最后,通过计算各类引发系统性能衰退的故障的性能...
基于改进扩展状态观测器的液压锚杆钻机滑模摆角控制
液压锚杆钻机 滑模控制 扩展状态观测器 自适应律
<
2024/1/16
液压锚杆钻机摆角系统固有的死区、干扰和时变参数严重影响其动态和稳态性能.为解决该问题,通过融合动态面方法、滑模方法和扩展状态观测器,提出一种基于改进非线性扩展状态观测器的液压锚杆钻机自适应滑模摆角控制方法.首先,引入一种死区补偿方法,建立摆角系统的死区补偿模型.其次,为提高系统的抗扰动能力和抑制噪声,设计一种改进的非线性扩展状态观测器.此外,构造一种自适应滑模控制律,这其中,基于性能函数和动态面方...
低压双极性直流微网故障自恢复的模糊控制方法
低压双极性 直流微网 自恢复控制 故障检测
<
2024/3/11
为了提高低压双极性直流微网故障检测和诊断能力,研究了低压双极性直流微网故障自恢复控制方法。首先提取低压双极性直流微网故障特征,分析低压双极性直流微网的输出稳定性特征,估计直流微网故障自恢复参数。再对低压双极性直流微网故障控制参数优化求解,根据参数求解结果,进行故障自恢复控制的状态寻优。通过直流多馈入误差补偿方法进行低压双极性直流微网故障自恢复的模糊控制,在此基础上进行参数辨识及收敛性控制,以此提高...
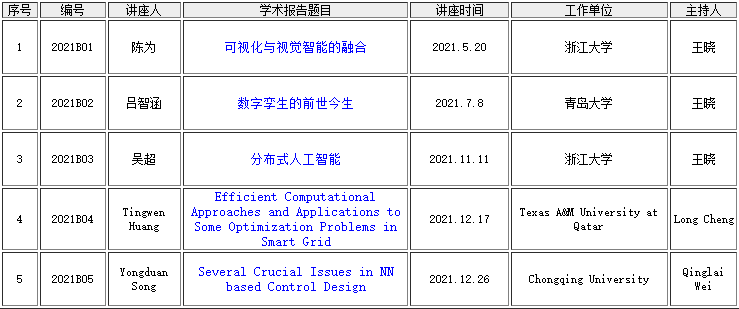
中国科学院自动化研究所复杂系统管理与控制国家重点实验室2021年系列讲座。

中国科学院自动化研究所复杂系统管理与控制国家重点实验室2022年系列讲座。

尿素水解反应器工作压力控制策略的研究与应用(图)
尿素制氨系统 压力控制 PID自动
<
2023/8/14
本文以某火电厂为例,介绍尿素水解制氨系统,分析脱硝及水解反应器系统运行工况,通过各参数的分析、优化运行方式及调整水解器蒸汽调节阀自动,解决水解反应器压力波动大、运行稳定性差的问题,保障机组充足供氨量,控制环保数据超标。