
搜索结果: 136-150 共查到“知识库 控制科学与技术”相关记录6775条 . 查询时间(0.74 秒)
江苏省自动化学会(图)
江苏省 自动化 非营利性社会组织
<
2022/12/31
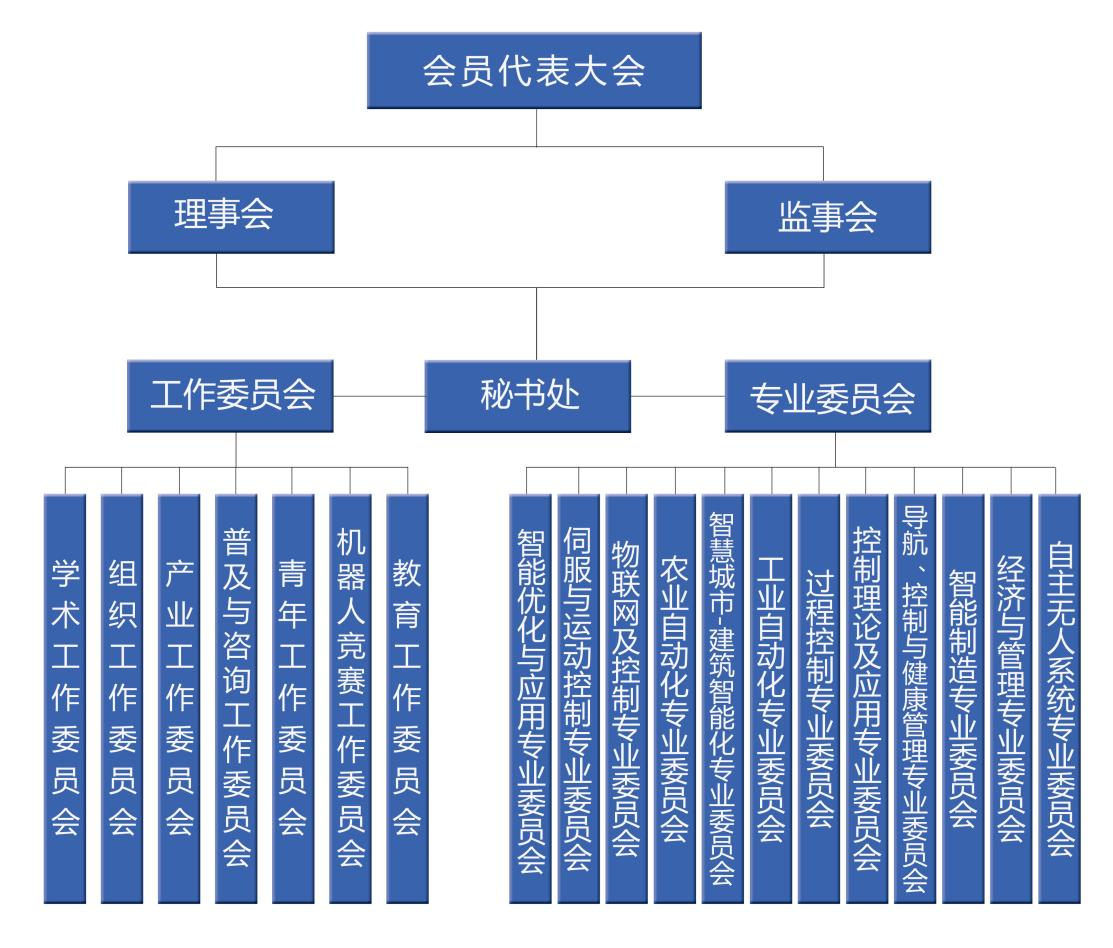
江苏省自动化学会是由全江苏省从事自动化科学及相关技术的科研、教学、开发、生产和应用的广大科技工作者和学术性群众团体自愿组成的学术性、非营利性社会组织。1977年10月经省科委出面与南京工学院、华东工学院、南京航空学院等院校联系,决定成立江苏省自动化学会,挂靠在南京工学院,由南工刘士中、曹大铸和华工邓岳甫等同志负责筹建。1978年由省科委主持召开省自动化学会筹备工作会议,提出理事单位、学会组织结构及...
安徽省自动化学会成立于1978年,是安徽省自动化科学技术工作者的学术性群众团体,是依法成立的社团法人,是安徽省科学技术协会的组成部分,本会同时为中国自动化学会的省级学会。本会涉及自动控制理论及应用、系统工程、仪表自动化与过程控制、计算机应用、电气自动化、智能控制与自动化等学科。
湖北省自动化学会是由湖北省从事自动化管理和研究的政府及其有关部门、科研教育事业单位、企业单位、团体的科学技术人员和管理人员自愿组成的非营利公益性的社会组织。是经湖北省民政厅核准登记的全省性跨部门、跨行业的综合性社会团体。
山东省自动化学会(Shandong Association of Automation,SAA)筹建于1984年,1985年3月1日在济南正式成立。学会发起单位包括山东省科学院、原山东工业大学、山东大学。现有团体会员127家,涵盖了驻鲁的高校高职、科研院所、自动化应用代表性企业、新兴科技创新和服务平台企业等,聚集了包括院士、长江、杰青、泰山等学术带头人和产业创新领军在内的科技精英和一线科技骨干。学...
辽宁省自动化学会
辽宁省 自动化 非营利性社会团体法人
<
2022/12/31
辽宁省自动化学会是经辽宁省社会团体登记管理机关核准登记的非营利性社会团体法人。学会挂靠在中国科学院沈阳自动化研究所,接受辽宁省民政厅和辽宁省科学技术协会的监督管理,接受中国自动化学会的业务指导。
黑龙江省自动化学会成立于1980年,是由黑龙江省民政厅批准成立的独立法人社团,是黑龙江省自动化科学技术工作者和自动化科学技术领域的企事业单位自愿组成的非营利性的学术性社会团体,挂靠在黑龙江省科学院自动化研究所,法人由黑龙江省科学院自动化研究所法人兼任。学会在业务上接受中国自动化学会和黑龙江省科学技术协会的指导,是党和政府联系自动化技术领域及其相关学科科技人员的纽带和桥梁。学会坚持科学技术工作面向经...
天津市自动化学会是经天津市科学技术协会批准,由从事自动化学科与相关学科的专家、学者、科技工作者,自愿组成的具有学术性、公益性法人社会团体。学会成立于1979年9月13日,受天津市民政局、天津市科协双重领导,挂靠在天津市工业自动化仪表研究所。
北京自动化学会由北京地区自动化领域工作者联合发起成立,是经北京市社会团体登记管理机关核准登记的非营利性社会团体法人。
基于改进型自主发育网络的机器人场景识别方法
机器人 场景识别 改进型自主发育神经网络
<
2024/1/22
场景识别是移动机器人在陌生动态环境中完成任务的前提.考虑到现有方法的不足,本文提出了一种基于改进型自主发育网络的场景识别方法,它通过引入基于多优胜神经元的Top-k竞争机制、基于负向学习的权值更新、基于连续性样本的加强型学习等步骤实现对场景的快速识别,并使该方法具有更好的适应能力.对于这种基于改进型自主发育网络的场景识别方法,通过实验进行了对比测试.结果表明,这种改进型自主发育神经网络节点利用率高...
SEAs导纳控制的μ综合方法
串联弹性驱动器 μ综合 导纳控制 混合稳定性
<
2024/1/22
SEAs(Series elastic actuators)具有在确保机器人性能的基础上兼顾其安全性的特点,因此被广泛地应用在康复机器人中.为实现良好的康复训练效果,机器人需根据实际要求呈现不同的阻抗特性.本文采用μ综合技术解决了SEAs导纳控制器的设计问题.首先,考虑参数摄动、传感器噪声、输入干扰及控制输入限制等不确定性因素,建立SEAs模型.其次,应用混合稳定性原理分析系统的交互稳定性.由于无...
为更好地解决移动机器人路径规划问题,改进蝙蝠算法的寻优性能,拓展其应用领域,提出了一种具有反向学习和正切随机探索机制的蝙蝠算法.在全局搜索阶段的位置更新中引入动态扰动系数,提高算法全局搜索能力;在局部搜索阶段,融入正切随机探索机制,增强算法局部寻优的策略性,避免算法陷入局部极值.同时,加入反向学习选择策略,进一步平衡蝙蝠种群多样性和算法局部开采能力,提高算法的收敛精度。
复杂机电系统设计自动化是知识自动化的一个重要分支,在机器人系统设计、高档数控机床设计、智能装备系统设计等方面具有重要的研究意义和应用价值.本文对进化计算在复杂机电系统设计自动化中的应用进行了综述.首先,介绍了几种常用进化计算方法及其优点;其次,对进化计算在电子系统、微机电系统和复杂机电系统三个领域的设计自动化进行了较为系统且全面的总结.然后,以一类典型的复杂机电系统―机器人系统的设计自动化为代表,...
浙江大学机器人研究院陈章位团队
浙江大学机器人研究院 陈章位团队 工业机器人测试技术 振动计量 测试和控制技术
<
2022/6/8
陈章位教授,男,1965年3月生,工学博士、博士生导师。1986年毕业于浙江大学科仪系,1995年获浙江大学流体传动和控制专业工学博士学位。中国振动工程学会常务理事,全国机械振动与冲击标准化技术委员会委员,《振动工程学报》、《振动与冲击》、《机床与液压》编委;负责起草国家标准3项,拥获授权发明专利20余项;曾先后主持各类项目百余项,发表论文100余篇,其中SCI、EI收录30余篇。2017年-20...