
搜索结果: 1-9 共查到“控制科学与技术 人机交互”相关记录9条 . 查询时间(0.064 秒)

2022年10月10日,美国斯坦福大学发布里了“全球前2%顶尖科学家榜单”,本次榜单统计数据时间节点为1960-2022年,涵盖全球200,409 位科学家,分为“终身科学影响力排行榜(1960-2022)”和“2022年度科学影响力排行榜”两个榜单。中国电子学会智能人机交互专家委员会委员宋爱国教授入选“2022年度影响力”榜单!

中国科学院自动化研究所提出三大“人机交互”新模型(图)
中国科学院自动化研究所 人机交互 新模型
<
2019/6/17
面对十万个为什么,计算机能否”谦虚谨慎”、准确回答?多轮口语对话中,计算机如何顺利接招,延续话题?顺着说、倒着说,首尾齐发,当突破人类极限时,高质量机器翻译呼之欲出……中国科学院自动化研究所研究者们提出三种“人机交互”新模型:任务型对话中,计算机也有了”自知之明”;人机多轮交互时,进一步强化语境记忆,提升了计算机口语理解能力;在生成文本时,首尾开弓的同步双向序列生成模型实现了质量与效率双赢。
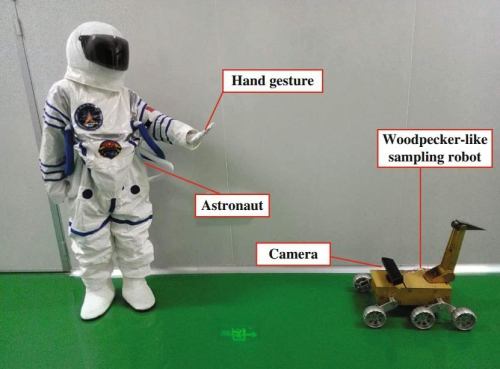
中国科学院沈阳自动化研究所在空间机器人人机交互研究取得新进展(图)
中国科学院沈阳自动化研究所 空间机器人 人机交互
<
2017/8/24
近日,第十届智能机器人与应用国际会议(简称ICIRA 2017)在武汉落幕。此次会议由华中科技大学和国家自然科学基金委员会联合举办,以“共融机器人”为主题,涉及康复机器人、水下机器人、空间机器人、人机交互、机器视觉等14个主题,700余位国内外参会者共同交流研究成果。会议期间,中国科学院沈阳自动化研究所多名科研人员参加会议并作交流报告。沈阳自动化所空间自动化研究室高庆、刘金国等撰写的论文Stati...
基于模糊强化学习的微创外科手术机械臂人机交互方法
微创外科手术机器人 人机力交互 强化学习 自适应导纳控制
<
2017/11/30
为实现微创外科手术机器人的手术姿态调整,提出一种基于模糊强化学习的变导纳人机力交互模型.通过在线学习的方式将人的操作特性考虑到人机力交互过程之中,并能够自适应地调整导纳控制模型以响应操作者的控制意图.通过自行研制的微创外科手术机器人样机进行相关的实验验证,实验结果表明基于模糊Sarsa (λ)学习的变导纳控制模型可实现柔顺自然的机械臂摆位操作,能够满足力交互过程中各阶段的阻尼变化需求,具有较高的可...
2017人机交互建模与智能控制方法研讨会(Workshop on Modeling and Intelligent Control Methods for Human-Robot Interaction)
2017 人机交互建模 智能控制方法 研讨会
<
2017/4/25
Recently, an increasing number of control researchers have been putting efforts in human-robot interaction (HRI). This attention on new intelligent control methods for HRI is motivated by the benefit ...
第十六届 IFIP人机交互国际会议(The 16th IFIP International Conference on Human-Computer Interaction)
第十六届 IFIP 人机交互 国际会议
<
2017/2/15
The 16th IFIP TC.13 International Conference on Human-Computer Interaction - INTERACT 2017 will be held from September 25-29, 2017 in Mumbai, India.
多指标动态规划的人机交互式满意权衡法
多指标数学规划 多目标决策 人机交互式方法
<
2008/12/29
1984年,Nakayama和Sawaragi提出了一种求解静态多目标决策问题的人机交互式满
意权衡方法.本文结合动态规划的结构特点,进一步发展了Nakayama方法的基本思想,表明
该方法可以推广到用来求解多指标动态规划问题,而且通过对原方法的改进,消除了其存在的
一些不足之处.本文所提方法,在较弱的限制条件下,针对一类普遍使用的多指标动态规划模
型,可以获得决策者充分满意的解.
基于网络的多机器人遥操作系统中的人机交互研究
多机器人遥操作 人机交互 时间标记 基于事件的方法
<
2008/7/17
针对基于网络的智能机器人遥操作系统中人机交互的主要难点和现有方法的不足,结合基于网络的多机器人遥操作系统的特点,应用多模式控制的方法丰富了操作者与机器人系统的交互途径,提高了操作效率。在此基础上,为解决网络时延给多机器人遥操作系统中的人机交互带来的问题,提出了一种带有时间标记的基于事件的方法,在保证系统稳定运行的同时提高系统的效率和性能。实验表明了所研究的方法的有效性和优越性。