
�������: 1-15 ���鵽�������뼼����ѧ����ѧ�� ����������ؼ�¼18�� . ��ѯʱ��(0.174 ��)

�����Ƚ�Ժ����������������ӿ��Ʒ�����ͼ��
����ͻ��� ���ܷ��� ���繤��
<
2023/8/19
����ͬ�ų��£�Эͬ���ƶ��������������������˶������ѵģ���Ϊ����Ĵų����Ʊ���ԶС��Эͬ���ƶ����������λ������ε�������ɶȣ�������ϵͳ����Ƿ������2023��8��14�գ��й���ѧԺ�����Ƚ������о�Ժ���������ܷ��������Ŷ���Կ���ϵͳǷ�������⣬�����һ�ֻ��ڸĽ��캽-���淨�Ķ����������������ӿ��Ʒ������״�ʵ����2����3�������������������ı������������·��������ơ��о��ɹ���Lead...
�й���ѧԺ�����Ƚ������о�Ժ���з����ܹ������������������Ľ��ʴ���������ͼ��
�������� �ͻ����� ���ʴ�������
<
2020/12/2
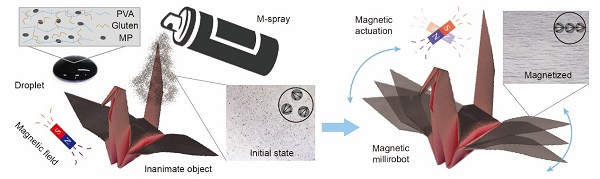
���գ��й���ѧԺ�����Ƚ������о�Ժ���������ܷ��������������о��Ŷ�����۳��д�ѧ���Ǿ��ŶӺ��������һ��ͨ�á�����չ����Ӧ�Բ�ͬ��������������ȫ�����췽ʽ�������ý��ʴ�������ʹ������Ŀ�������Ϊ�ɿ�����������о��ɹ���An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedica...

����������ѧѧ�ӻ�ڶ����й��о���������������ƴ���һ�Ƚ���ͼ��
����������ѧ �ڶ��� �й��о��� ������ ������ƴ��� һ�Ƚ�
<
2020/9/30
2020��9��23����25�գ��ڶ����й��о���������������ƴ��������������й������Ƽ����¸۾ٰ죬�����廪��ѧ����������ҵ��ѧ���㽭��ѧ�����пƼ���ѧ��������ͨ��ѧ������������ѧ��69����У�Ϳ���Ժ����154֧�����������������ֳ�չʾ����������ר����ѯ�Ȼ��ڼ��ҽ��𣬱���������ѧ��Robotic Jerry���о����Ŷ��ٻ�һ�Ƚ�������2��Ԫ��������ƷΪ��С�����ܷ����������˴�����������...

���ϴ�ѧѧ����������ն���й��о���������������ƴ���һ�Ƚ���ͼ��
���ϴ�ѧ �й��о��� ������ ������ƴ��� һ�Ƚ�
<
2020/9/30
9��25�գ��ɽ�����ѧλ���о���������չ����ָ�����й�ѧλ���о�������ѧ��ȵ�λ���죬������ͨ��ѧ�ȵ�λ�а�ĵڶ����й��о���������������ƴ����ܾ��������Ļ��������������69����У�Ϳ���Ժ����154֧����μӡ�����У���繤��ѧԺ½�½�����ָ���������ء���������誡����܈ҡ���ɯɯ��ͬѧ�齨��ѧ���Ŷӣ��������ҽ����ٻ�һ�Ƚ��������Ǹ��Ŷ������ڶ��λ�����١�

�й���ѧԺ�����Ƚ������о�ԺAIE�������������о�ȡ����Ҫ��չ��ͼ��
�й���ѧԺ�����Ƚ������о�Ժ AIE���� ����������
<
2020/9/4
���գ��й���ѧԺ�����Ƚ������о�Ժҽҩ������ҽ�Ƽ����о����IJ������о�Ա�������ɸ��о�Ա����Ƽ�о�Ա���˹ھ���ʿ������ۿƼ���ѧ�Ʊ���Ժʿ����̶��ѧ�»��ܽ��ں�����������ʱ��Ŭ�����ɹ��з���һ�ֻ��ھۼ�����Ԫ����AIE������������ϵͳ����Ѫ�����ϴ�Խ���Խ������������ơ��������Natural-Killer-Cell-Inspired Nanorobots with Aggregation-Ind...

�й���ѧԺ�����Ƚ������о�ԺAIE�������������о�ȡ����Ҫ��չ��ͼ��
�й���ѧԺ�����Ƚ������о�Ժ AIE���� ����������
<
2020/9/8
���գ��й���ѧԺ�����Ƚ������о�Ժҽҩ������ҽ�Ƽ����о����IJ������о�Ա�������ɸ��о�Ա����Ƽ�о�Ա���˹ھ���ʿ������ۿƼ���ѧ�Ʊ���Ժʿ����̶��ѧ�»��ܽ��ں�����������ʱ��Ŭ�����ɹ��з���һ�ֻ��ھۼ�����Ԫ����AIE������������ϵͳ����Ѫ�����ϴ�Խ���Խ������������ơ��������Natural-Killer-Cell-Inspired Nanorobots with Aggregation-Ind...
��ѧ�빤�̿�ѧѧԺ��ʿ�о�����Ө��������ѧϰ�ķ���Ԥ��ɹ��ڡ�Energy conversion and management��������ͼ��
��ʿ�о�����Ө ������ѧ ��Դ������ѧ
<
2022/5/26
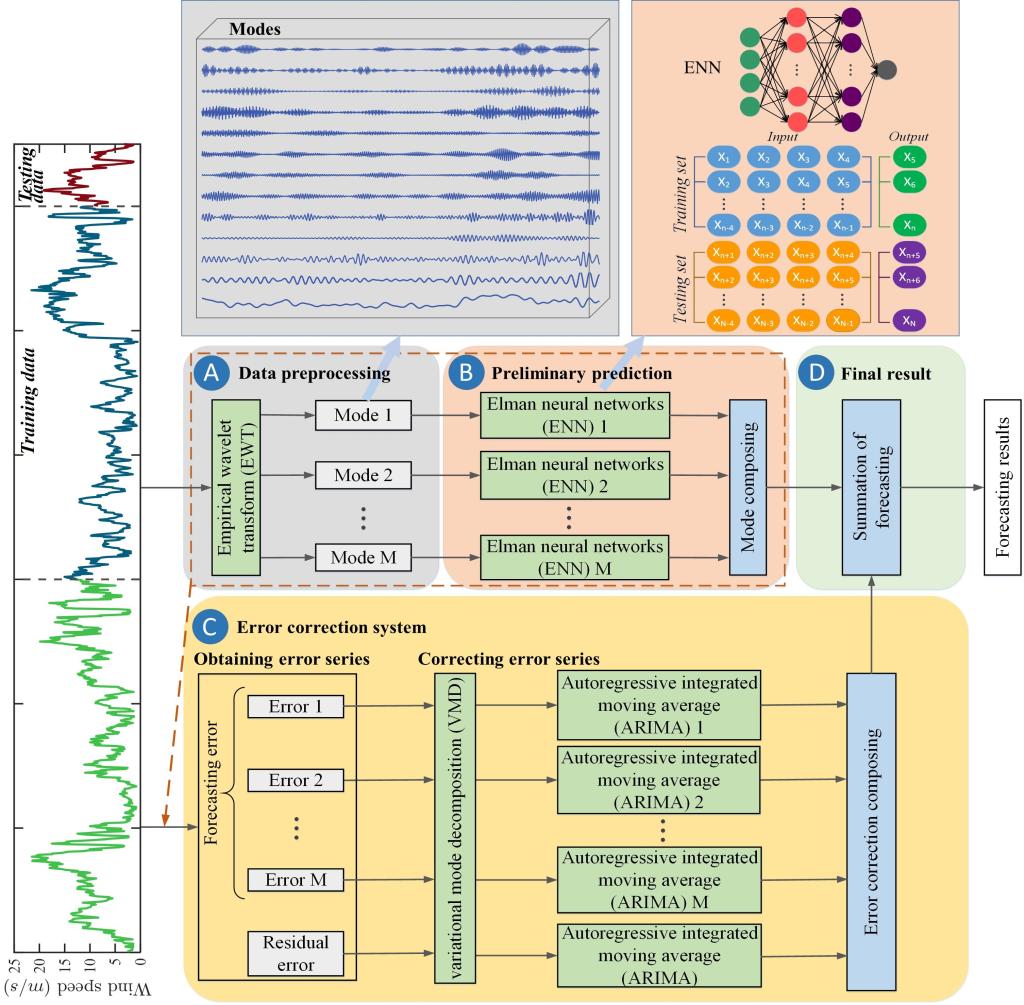
��ѧ�빤�̿�ѧѧԺ������ѧ��ʿ�о�����Ө��¬־�������������ڵ�ָ���£��ڹ�������ѧ���ڿ���Energy Conversion and Management����Ӱ�����ӣ�7.18�����̼���1�����Ϸ�����Ϊ��A hybrid model based on data preprocessing strategy and error correction system for wind speed for...

��27��IFToMM���������������������������ѧ�߶���̳���У�ͼ��
��27�� IFToMM ����������� ���� ������ѧ �߶���̳
<
2018/11/23
2018��10��26-28�գ���Ϊ���ݴ�ѧ60����У��ϵ�л֮һ���˹�����/����������̳������27��IFToMM���������������������������ѧ�߶���̳�ڸ��ݾٰ졣����̳��IFToMM���������������ίԱ�����죬���ݴ�ѧ�а졣���ϣ����ѧ�߾ͻ�����������ѧ�����ڹ�ͬ��ע������չ�����ۡ������ĵá����Թ��ڡ��������������ѧ�����ʮ��λר�ң�Χ����������������Ӧ�á���˳���������Ż���չ��˼������...
������������������¾������Թؽڡ��ⲿ�Ŷ��Ͳ�����ȷ����Ư�����ռ�������ϵͳ�Ķ���ѧ��ģ���˶����ƺ����������ơ������������շ��̺�ϵͳ�Ķ������������غ��ϵ����ϵͳ����ѧ���̡������������㶯���ۣ���ϵͳ�ֽ�Ϊ����ʱ��߶ȵ�������ϵͳ�Ϳ����ϵͳ�����������ϵͳ�������һ�ֻ���˫�����Һ�����³��ģ����ģ���Ʒ������÷�������Ҫ֪��ϵͳ�ľ�ȷģ�ͣ��ܹ��������Թؽڴ�����ϵͳת����ʵ�ֿռ�����������...
��������پ�����ҵ�Ļ����������������ܿ��ƹؼ������о��� ͨ�����գ�ͼ��
���پ�����ҵ ���������� ���ܿ��ƹؼ������о� ͨ������
<
2013/5/7
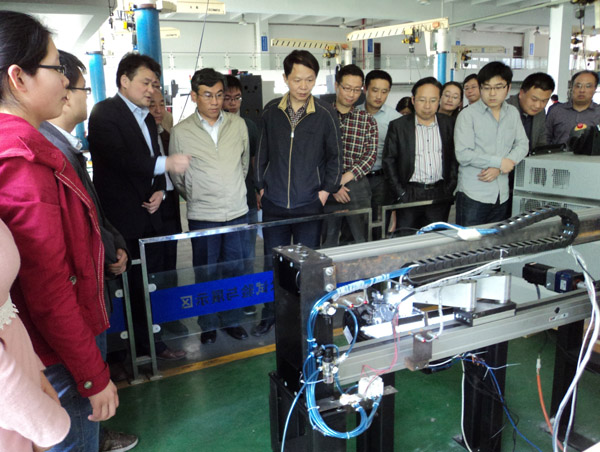
2013��4��28�գ�2010�꽭��ʡ�Ƽ�֧�żƻ���Ŀ��������پ�����ҵ�Ļ����������������ܿ��ƹؼ������о��������߳ɹ����������п�Ժ�Ϸ����ʿ�ѧ�о�Ժ�Ƚ����켼���о����ٿ����ܽ���ʡ�Ƽ���ί�У������пƼ�����֯ר�ҶԸ���Ŀ���������ա�������
Ư�������Թؽڿռ�����������Ӧ��ģ�˶����Ƽ�����������
Ư�����ռ������ ���Թؽ� �����㶯 ������ȷ�� ����Ӧ ��ģ
<
2014/5/16
�����˹ؽ�������ϵͳ������ȷ����Ư�����ռ�������ϵͳ�Ķ���ѧ��ģ���̡��˶��켣���ٿ����㷨��Ƽ�ϵͳ�����������������⡣����ϵͳ�������������غ��ϵ���������շ���ϵͳ����ѧ���з���,������ϵͳ����ѧ���̡����������㶯����ϵͳ�ֽ�Ϊ��ʾϵͳ�����˶����ֵ�������ϵͳ�ͱ�ʾϵͳ�����˶����ֵĿ����ϵͳ�����������ϵͳ�����һ������Ӧ��ģ�����㷨���ÿ����㷨���ɻ��ڻ�ģ��ĵ�Ч���������Ӧ�������P...

����ˮ��������ר��������Ժʿ������ͼ��
����ˮ�� ������ ר��������Ժʿ ����
<
2012/2/20
�й������������㵳Ա���й�����ԺԺʿ������DZ����ˮ����������������ר�ң����������̴�ѧ���ڡ���ʿ����ʦ��������ҽ����Ч����2012��2��17������11ʱ53�ֲ�������������70�ꡣ
���Ƴɸ�Ч�������ɳ� ��̽��Σ�ջ�����ͼ��
��Ч�ͻ��� �ɳ� Σ�ջ���
<
2010/9/26
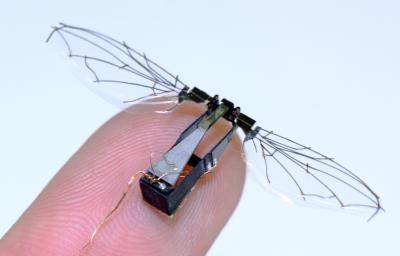
����������ѧ����֯�����������������ѧ��������ʵ���ҽ��������һ�����˴�����е��������ɳ棬������ſ���Ϊ3���ף�Ϊ�����վ��з�����һ����Ч�Ϳ��з��й��ߣ�MAVs���춨�˻�����
��ߴ�߾��������Ӿ����ϵͳ
��ߴ� �߾��� �����Ӿ����ϵͳ
<
2009/3/10
�ܵ��ֱ��ʵ����ƣ������Ӿ�ϵͳ����ʵ�ִ�ߴ硢�߾��Ȳ���������Ŀͨ���о�����߾��Ȳ���ϵͳ�ķֱ��ʣ�ʵ���˴�ߴ硢�߾��Ȳ�����
�����������ζ�������һ���������
���ܲ��� �������������� ������ �Ż����
<
2013/10/15
ͨ��������Ȼ�������ζ��ص����Ȥ�Ĺ��ɵ�, �� ��һ���������������˼��. �Գ������������ܲ���Ϊ��, �о������������߿� �Ʒ������ζ������ͷ���. ���úϽ𱡰�ģ����β�Ǽ�, ���ڸñ���ij������� ������ģ�����弡��, �Լ��ⲿ�ų�ģ������, �Ӷ������˸������һ����ѧ ����ģ�ͺ�ϵͳ. ͨ���о���ų�Ƶ����������β�ڶ������������Ĺ�ϵ, ���� ������ѵ���ų�Ƶ��. �������õ�����ų�Ƶ��,...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...