
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� ��������ؼ�¼78�� . ��ѯʱ��(0.299 ��)
���Ķ�2023��ȹ�����Ȼ��ѧ����ίԱ���Զ�������(�������F03)�µ�������Ŀ�������ѧ������Ŀ��������ѧ������Ŀ���ص���Ŀ�����������ѧ������Ŀ���ҽܳ������ѧ������Ŀ���������������������ͳ�Ʒ���,����������Ŀ�������ѧ�������Ŀ�������������е�λ���������ֲ������������ϸ����,�����˱�����ѧ�������Է���������Ե�͡������Ρ����������ƹ��ס���������Ե㹤��,���������ܽ��չ����
��ģ���������о�����
������� ��ģ����� �Ʒ��� �������ܹ� ��ģ���漴����
<
2024/1/16
��ģ���������������û�����,֧�Ű�����ʽ�ģ�������������Ч�ֶ�.�������ȴӽ�ģ��������ķ��ʡ������Լ������������������Խ�ģ�������ĸ�����б���;���ӷ���ķ��ࡢ����㼶������Ԫ�غ�״̬�ĸ��ǶȶԽ�ģ����������������в���.Ȼ��ӻ�����ҳ�ķ��桢�����������ܹ�(Service oriented architecture,SOA)�ķ���ϵͳ�����ͷ�������ʩ����ά�ȶԽ�ģ�����...

�п�Ժ�Ϻ���Ժ������������Accounts of Materials Research�Ϸ���������̼��Janus��Ĥ�����ڴ��С���������һ�廯����������������ͼ��
���������� ̼��Janus��Ĥ ���� ���� һ�廯������������
<
2023/2/4
Janus��Ĥ���ھ��в��ԳƵĽṹ�Ͷ��ص�������ѧ���ʣ��ڴ��С���������Դ�������Ƚ�����ȷ�����ֳ��˾��Ӧ��DZ�������У���������Ƥ�����ڼ��������֪���������ܼ��ɵ��ص㣬�Ѿ����������ǹ㷺���о���Ȥ��Ϊʵ����Щ�ض��Ĺ��ܣ���Ҫѡ����ʵĻ��Թ��ܲ��ϲ��Կɿصķ�ʽ�γɲ��ԳƵĽṹ��̼���ײ������ھ�������ĵ���͵������ܡ�������е�����ԡ���ѧ�����ȶ��ԡ����ڼӹ����ŵ㣬��һ�ּ���Ӧ��ǰ���Ļ�...
���ӻ���ϵͳ����Զ�����֪ʶ�Զ�����һ����Ҫ��֧,�ڻ�����ϵͳ��ơ��ߵ����ػ�����ơ�����װ��ϵͳ��Ƶȷ��������Ҫ���о������Ӧ�ü�ֵ.���ĶԽ��������ڸ��ӻ���ϵͳ����Զ����е�Ӧ�ý���������.����,�����˼��ֳ��ý������㷽�������ŵ�;���,�Խ��������ڵ���ϵͳ������ϵͳ���ӻ���ϵͳ�������������Զ��������˽�Ϊϵͳ��ȫ����ܽ�.Ȼ��,��һ����͵ĸ��ӻ���ϵͳ��������ϵͳ������Զ���Ϊ����,...
�㼯Ⱥ�ζ��Ľ��ܻ����о�����
��Ⱥ ��Ⱥ�ζ� ���ܻ��� ���
<
2024/1/23
��Ⱥ������������һ�ֳ���������,�ض���ӵļ�Ⱥ�˶��������������Ⱥ���ζ�Ч��.�㼯Ⱥ�ζ����ܻ������о�Ϊ�����˼�Ⱥ�����ƺͿ����ṩ���������,�õ����о���Ա�Ĺ㷺��ע.���Ľ������㼯Ⱥ�ζ����ܻ����о�����Ҫ���������µ��о��ɹ�,���о�������Ϊ��Ⱥ�۲������������������ѧ���淨��ʵ��װ���о���,�����ڴ˶Խ�Щ����о��ɹ������������ͷ���,����о����㼯Ⱥ�ζ����ܻ����о�����Ҫ������δ����չ����

�й���ѧԺ�����Զ����о��������������˼�������ҽѧӦ���о��������£�ͼ��
�������� ��۳ߴ� ����ҽѧ �ٴ��������� ��֢���Ի�����
<
2021/8/13
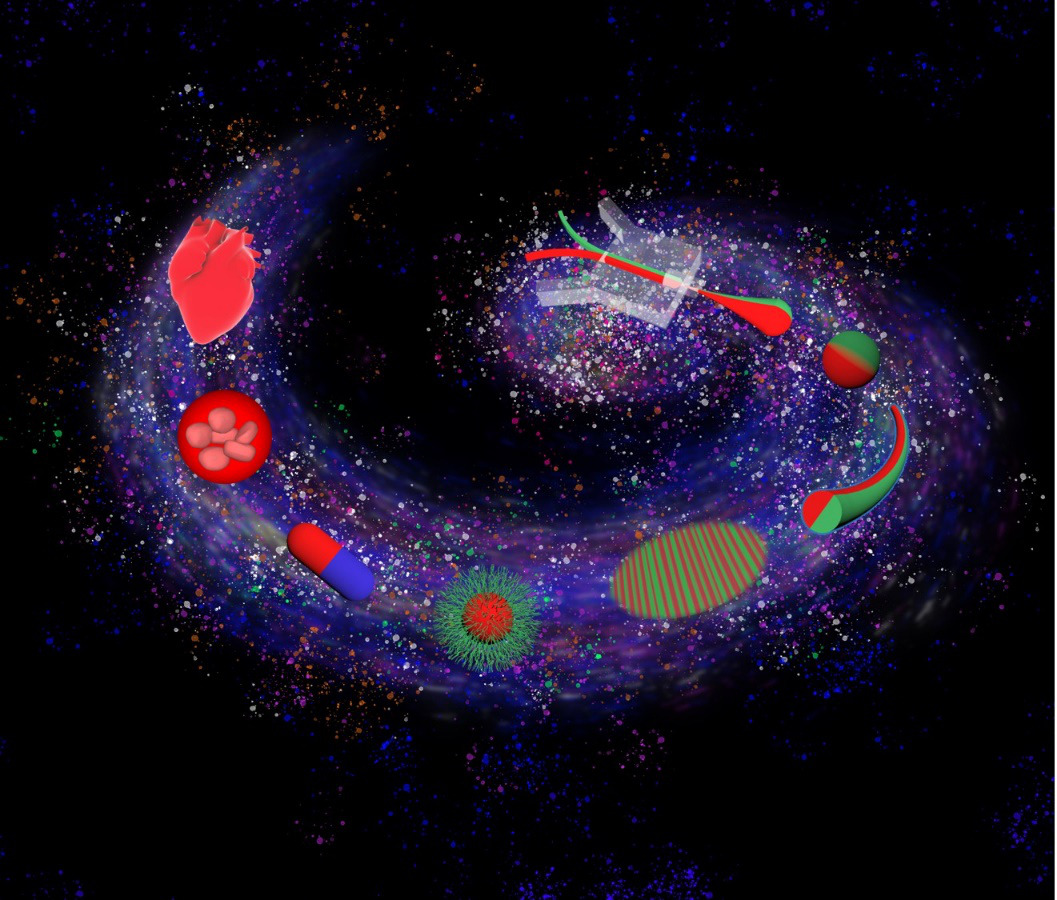
�������˼�����ָ�����������׳߶�ִ���������֪���������������ƽ������ơ�Эͬ�ȣ��Ļ������豸/ϵͳ���������˼����о��ڽ�����ȡ���˽�չ��һ���棬�����������ߴ������׳߶ȵ��������ˣ���DNA�������ˣ�������װ��ҩ����Ӳ�����Ѫ����ҩ������������ض��ص㣨�簩ϸ������ʵʩ���嵥ϸ������ҩ����һ���棬�����˱����Ǻ�۳ߴ磬��ĩ��ִ�����ɶ�����������л����˻����������ײ��������ˡ��������˼�...
�й���ѧԺ�����Ƚ������о�Ժ�������ع����ɹ��ܲ��ϼ�������ҽѧӦ��������ͼ��
���仯�˿� �ɹ��ܲ��� ����ҽѧ
<
2021/8/27
�������仯�˿ڵļ������ӣ��������������Ի�������ȫ��Χ�������˹㷺��ע���ṹ�����ܿɱ���ȷ��г���ɹ��ܲ��������ڼ������Ʒ���Ĺ���Ӧ��ǰ����Ϊ�˽������о��Ľ��㡣Ȼ������ͳ�����Ʊ�������ģ�巨����Һ�ۺϷ�����ɢ�ۺϷ�����������Ⱥ��Ѹ�ͨ��������ýṹ�����ܿɱ���ȷ��г���ɹ��ܲ��ϡ�

��ͼ����������ʶ���������������˻������죬�˹����ܣ�AI���ڸ��и�ҵ����Խ��Խ��Ҫ�����á��������� ����AI�ڼ�������ѧ�����ͻ����Ӧ�ã�����AI������ҩ�з���ΪAIӦ�������һ�����ŷ���ͳ����ҩ�з�ƽ����Ҫ12���ʱ���20��30�������Ͷ�룬���ٴ�ǰ���о�ƽ������Ҫ����5-6���ʱ�䡣��μ�����ҩ�з����̣��Ѿ���Ϊ������ҩ��˾������Ҫ�����ս�������⡣�ڴ˴������£�AI���ٴ�ǰ��ҩ��...

�й���ѧԺ�����Ƚ������о�Ժ��۲�ʿ��������Chemical Society Reviews�Ϸ������ؼ����������£�ͼ��
����ѧ ���ؼ��� ���ط������ɻ�
<
2021/9/10
2018�꣬�й���ѧԺ�����Ƚ������о�Ժҽ������������۸��о�Աд�ij�ƪ�������ġ�Micro-optics for microfluidic analytical applications�������߿�����Ӣ���ʼһ�ѧѧ�����Ĺ�����Ҫ�����ڿ�Chemical Society Reviews ��IF = 38.618�������������۲�ʿ����ʿ��ɣ����������ѧ��EPFL����Martin Gijs��...
DARPA����ֹ�����������Ŀ����
����ֹ��� �Ǻ���Ŀ�� �ռ�ٿ� �ռ��е��
<
2017/12/1
ϵͳ�������������������о��ƻ��֣�DARPA�������ĵ���ֹ����ٿ���Ŀ�ķ�չ���̣������˿ռ�ٿ��漰�Ŀռ��е����ơ��Ǻ���Ŀ��̽��ʶ������Ե�������ȫ�ƽ�ͣ����ƽ̨���е��Эͬ���ơ����Эͬ��ϸ��ҵ��˳���ơ�ң�������������������ȹؼ���������������DARPA����ֹ����ٿ���Ŀ�ķ�չ��ʾ�������ҹ�����ֹ����ٿ���Ŀ��չ˼·����˽��飮
��������˽ṹ���������������о�����
��������� ���ܲ��� ��������
<
2019/1/2
�����������һ�����ͻ����ˣ����нṹ�����ȸߣ�������Ӧ�Ժã�����ǿ�����ܶ������ص㣬����ʮ�ֹ������о���Ӧ��ǰ��. ���ܲ�������������˽ṹ��Ƽ�ʵ��Ӧ���а�������Ҫ�Ľ�ɫ����������������Ƽ�����չ����������˵Ĺ���. ��������������˵ķ�չ���о���״������Ӧ�ó��ϼ������ܽ��˼��ֵ��͵����������. �ӷ��������ĽǶȣ���������桢�������г桢�����ζ��ȼ�������˶������Լ�����Ӧ�����������. ��...
ͳ�����Դ�źŷ���ģ�����㷨����
äԴ���� �����ɷַ��� ��سɷַ��� ϡ���ʾ �߹����
<
2016/1/4
ͳ�����Դ�źŷ������۲������Ź㷺��Ӧ�ñ���,ҲΪ�����˽����ݵı��ʽṹ�ṩ����Ч�ķ�������.����,�ص����������һ����������Դ�źŷ���ģ�͡��C�����ӿռ����ģ�͵Ŀɷ�����;���,�ֱ���ܻ���Դ�ź�ϡ���ԡ�ͳ�Ʋ�ȡ������ӿռ������Դ�ź�ʱ��ṹ��Դ�ź��н��ԺͷǸ��Եĸ������Դ�źŷ����㷨;�ٴ�,ͨ�������������е�äԴ����߹�������⽨ģΪͳ�����Դ�źŷ���ģ��,�����˸÷�����Ӧ�ü�ֵ;��...
����Ъ��������Ϊ���ù��ϻᵼ�²���Ҫ��ͣ����ά�����⣬Ӱ��ս������Բ����ά�ޱ�����Դ �˷ѣ��������һ�ּ�Ъ������Ϸ����������˼�Ъ���϶�ϵͳ��Ӱ�죬�����˼�Ъ����������ٵļ����ѵ㣬�� ���˹�����ѧ��Ъ������Ϸ��������Լ�Ъ����ʧЧ�������ݻ����ɡ�������Ъ�����ù��ϵ����ģ���뷽���� �����˻���Ӧ���µļ�Ъ������Ϸ���3 ��������Ҫ��չ�Ľ�һ���о����������˲��������о�Ϊ��Ъ������ϣ� ...
�������ϵͳ����
ˮ�»����� �������ϵͳ ˮ��̬������֪ ��������
<
2016/9/27
����ϵͳ��ˮ�ж����ر����������Ҫ��֪ϵͳ��������������Ч��֪��Χ��ˮ��̬������Ϣ����ˮ �л����ˣ��ر��Ƿ�������������ƺͰ�װ�������ϵͳ���ǵ�ǰˮ�л������о����·�����ȵ㡣����������� ��ϵͳ�Ľṹ�ص��֪ԭ�����������������ϵͳ��ʵ��ԭ���͵�ʵ���о�״�����������������ϵͳ�о����� ��һЩ�ѵ�����⣬���Խ��ķ�չ���ƺ�Ӧ��ǰ��������չ����
���ƽ��������е�ѹ�ȼ������Ч�ʺ���������������Լ���Ÿ���С���ŵ㡣���иߵ�ѹ�ȼ��ĵ��ܱ任�������Ź����ķ�չǰ������ϸ�����˶��ƽ�������ͳ�����˵���ȱ������÷�Χ�����ص��о��˼����������˵Ĺ���ԭ����ͨ���Ա����������봫ͳ�����˿�֪�����ٿ���������ʹ�á���·����Ʋ��������˵�·��չ��һ����Ҫ�����ƽ��������˽ṹ���Ÿ����ԡ������Է�������Ʒ�չ��
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...