
搜索结果: 1-15 共查到“控制科学与技术 深度”相关记录32条 . 查询时间(0.229 秒)
针对机器人摄影测量中离线规划受初始位姿标定影响的问题,提出融合初始位姿估计的机器人摄影测量系统视点规划方法.首先构建基于YOLO(You only look once)的深度学习网络估计被测对象3D包围盒,利用PNP(Perspective-N-point)算法快速求解对象姿态;然后随机生成机器人无奇异无碰撞的视点,基于相机成像的2D-3D正逆性映射,根据深度原则计算每个视角下目标可见性矩阵;最后...
中国科学院自动化所揭示深度学习模型对幻觉轮廓“视而不见”(图)
自动化所 学习模型 幻觉轮廓 视而不见
<
2023/5/7
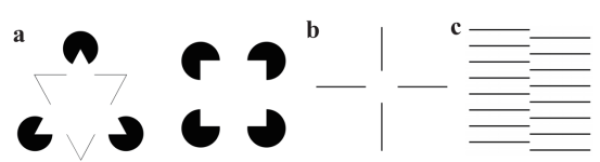
2023年3月30日,中国科学院自动化研究所研究员曾毅课题组基于人类和生物视觉系统中广泛存在的幻觉轮廓现象启发,提出了一种将机器学习视觉数据集转换成幻觉轮廓样本的方法,量化测量了当前的深度学习模型对幻觉轮廓识别能力。实验结果证明从经典的到最先进的深度神经网络均难以像人一样具有较好的幻觉轮廓识别能力。相关研究成果发表在Patterns上。

第七届深度强化学习理论与应用研讨会顺利召开(图)
算法应用 交通信号控制 无人系统
<
2023/5/22
2023年1月5-6日,第七届深度强化学习理论与应用研讨会顺利举行。活动聚焦深度强化学习(DRL)与博弈、自动驾驶和机器人等方向的前沿进展与最新成果开展研讨交流,并邀请4位领域专家分别从“小样本强化学习算法及应用的研究进展”,“基于深度强化学习的交通信号控制进展”,“无人系统分布式协同控制”,“基于深度强化学习的智能电网新能源高效利用”等不同主题进行了精彩分享。报告环节在线上平台进行同步直播,吸引...
基于深度学习的二维人体姿态估计
深度学习 二维人体 姿态估计
<
2022/12/30
人体姿态估计是计算机视觉领域的一个基础且具有挑战的任务,人体姿态估计对于描述人体姿态、人体行为等至关重要.有许多计算机视觉任务都是以人体姿态估计任务作为基础的,包括行为识别、行为检测等等.近些年,随着深度学习技术的发展,尤其是随着卷积神经网络算法的提出,我们可以通过神经网络强大的拟合能力和特征提取能力建立一种隐式的人体姿态估计模型,大大降低了人体姿态估计的门槛,同时也提高了人体姿态估计的准确率,这...
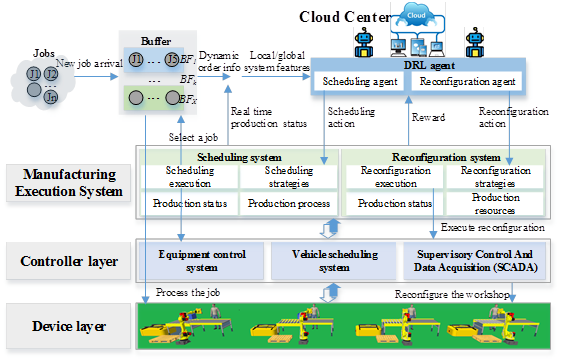
2021年10月,中国科学院沈阳自动化研究所在车间智能调度方面研究取得新进展,基于深度强化学习方法实现了动态订单下可重构车间对动态生产调度和车间重构的实时优化和智能决策,研究成果发表在International Journal of Production Research。由于车间调度问题大多属于NP难问题,传统元启发式算法只能在多项式时间内求得近优解。对大规模问题,元启发式算法的求解时间难以满足...
基于深度强化学习的双足机器人斜坡步态控制方法
准被动双足机器人 深度强化学习 步态控制 步行稳定性
<
2024/1/22
为提高准被动双足机器人斜坡步行稳定性,本文提出了一种基于深度强化学习的准被动双足机器人步态控制方法.通过分析准被动双足机器人的混合动力学模型与稳定行走过程,建立了状态空间、动作空间、episode过程与奖励函数.在利用基于DDPG改进的Ape-X DPG算法持续学习后,准被动双足机器人能在较大斜坡范围内实现稳定行走.仿真实验表明,Ape-X DPG无论是学习能力还是收敛速度均优于基于PER的DDP...
中国科学院沈阳自动化研究所等在深度学习泛化能力研究中获进展
深度学习 人工智能 网络深度 机器人学
<
2021/8/13
深度学习是近年受到关注的研究领域,在人工智能与模式识别相关问题解决上表现出优越的性能。然而,随着求解问题复杂度的提升,网络深度也在加深。目前,该领域主要挑战之一是挖掘网络深度和求解问题复杂度之间的关系,明确网络深度及其泛化能力。中国科学院沈阳自动化研究所研究员韩志等联合西安交通大学教授林绍波、香港城市大学教授周定轩开展合作,通过在特征提取上深度-参数的平衡选择,给出特征与网络深度之间的相互适应性,...
中国科学院沈阳自动化研究所在深度学习泛化能力研究上取得重要进展
中国科学院沈阳自动化研究所 深度学习 泛化能力
<
2020/11/27
近日,依托于中国科学院沈阳自动化研究所机器人学国家重点实验室在深度学习泛化能力研究上取得了重要进展。以韩志研究员为第一作者、博士生余思泉为第二作者的最新研究成果Depth selection for deep ReLU nets in feature extraction and generalization近日发表于国际人工智能与模式识别模式领域顶级期刊IEEE Trans. on Patter...

中科院自动化所深度强化学习团队提出了一种基于深度强化学习的未知环境自主探索算法,能够使机器人在没有先验的环境中自主探索,并实时构建环境地图。论文发表在2020年IEEE TNNLS上[1]。未知环境探索是指机器人在没有任何先验知识的情况下,在一个新的环境中通过移动而建立完整环境地图的过程,反映了机器人系统的自主决策能力和对环境的适应性,是机器人领域的一个热点问题。它在实际中有着广泛的应用场景,如救...

中国科学院沈阳自动化研究所基于深度学习的航拍图像目标检测研究取得进展(图)
中国科学院沈阳自动化研究所 深度学习 航拍图像 目标检测
<
2019/12/18
近日,中国科学院沈阳自动化研究所创新性地提出了去除航拍图像检测结果中误检目标的方法,并针对航拍图像特性设计了相应的检测网络。相关成果发表在Sensors上。航拍图像的目标检测在农业、资源勘探等领域有着广泛的应用需求,上述场景中严格的检测要求也推动了检测算法的改进创新。在基于深度学习的目标检测方法中主要有两种类型的优化手段:针对待检测目标特性优化检测网络框架;优化检测结果后处理方法。
基于简化潜艇深度分布的应召搜潜效率仿真
反潜直升机 应召搜潜 垂直分布概率密度 三维模型
<
2020/7/24
针对传统直升机吊放声纳搜潜效率计算采用的二维模式对于反潜直升机搜潜效率的计算不准确的问题,提出了一种简化的潜艇在深度上的位置分布,并以这种位置分布为基础,结合吊放声纳在不同深度上的不同传播损失,构建了搜潜效率计算的三维模型。以应召搜潜最具代表性的扩展方形搜索法为例进行了仿真计算,结果表明,所提出的三维模型对比传统的二维模型对于反潜直升机整个搜潜作业的概率计算更为精确。对反潜作战及相关决策具有一定参...
基于Preisach模型的深度学习网络迟滞建模
压电扫描器 迟滞非线性 Preisach模型 深度学习
<
2018/7/17
针对传统压电扫描器迟滞模型泛化能力较弱的问题, 提出了一种基于Preisach 模型的深度学习网络来建立迟滞模型, 提高了模型的学习能力和泛化能力. 具体而言, 首先利用深度学习在深度特征提取方面的优势, 建立包含卷积层、池化层、展开层以及深度特征层的深度学习层来提取输入电压信号的特征信息; 其次, 利用傅里叶变换层计算得到输入信号的频率, 并将频率输入到非线性层, 构造并输出了与输入信号频率相关...
一种基于深度学习的机械臂抓取方法
机械臂抓取 深度学习 目标检测 分类
<
2017/11/30
提出了一种基于深度神经网络的机械臂最优抓取位置检测方法.相比传统手工设定的特征,基于深度神经网络的方法学习得到的特征具有较强的鲁棒性和稳定性,能够适应训练集中未曾出现的新物体.本方法首先使用基于深度学习的目标检测算法对图像中的目标物体进行检测,记录目标的类别和位置.然后根据分类检测结果,使用基于深度学习的机械臂抓取方法进行抓取位置学习.仿真实验表明所提方法能对图像中的目标物体进行较为准确的分类,在...
为从单目图像中提取到丰富的3D结构特征,并用以推测场景的深度信息,针对单目图像深度估计任务提出了一种结构化深度学习模型,该模型将一种新的多尺度卷积神经网络与连续条件随机场统一于一个深度学习框架中.卷积神经网络可以从图像中学习到相关特征表达,而连续条件随机场可以根据图像像素的位置、颜色信息对卷积神经网络输出进行优化,将二者参数以联合优化的方式进行学习可以提升模型的泛化性能.通过在NYU Depth数...
Recent advances in deep learning techniques have made impressive progress in many areas of computer vision, including classification, detection, and segmentation. While all of these areas are relevant...