
搜索结果: 1-15 共查到“控制科学与技术 嵌入式”相关记录42条 . 查询时间(0.12 秒)
中国科学院合肥物质科学研究院专利:一种基于嵌入式控制器的机器人控制方法和装置
中国科学院合肥物质科学研究院 专利 嵌入式 控制器 机器人控制
<
2023/9/25
中国科学院合肥物质科学研究院专利:一种基于嵌入式控制器的机器人控制方法和装置
中国科学院微电子研究所专利:基于ARM的嵌入式注入机控制系统
中国科学院微电子研究所 专利 ARM 嵌入式 注入机 控制系统
<
2023/7/10
中国科学院微电子研究所专利:基于ARM的嵌入式注入机控制系统

华南理工大学电子与信息学院学生全国大学生嵌入式芯片与系统设计竞赛暨智能互联创新大赛获佳绩(图)
华南理工大学电子与信息学院 全国大学生嵌入式芯片与系统设计竞赛 嵌入式芯片 系统设计
<
2022/7/25
全国大学生嵌入式芯片与系统设计竞赛暨全国大学生智能互联创新大赛由中国电子学会主办,东南大学、南京市江北新区管理委员会和南京集成电路产业协同创新学院共同承办,国内外知名厂商协办。大赛每年举办一届,按照初赛、分赛区复赛及全国总决赛三阶段进行。其中,初赛由参赛队根据竞赛通知指定方向自主选题开展项目设计,由大赛专家组评审决定是否获得参加分赛区复赛资格。分赛区复赛获得一等奖的参赛队自动获得全国总决赛资格。
2017年嵌入式实时系统的安全性和可靠性研讨会(2nd Workshop on Security and Dependability of Critical Embedded Real-Time Systems)
2017年 嵌入式 实时系统 安全性 可靠性 研讨会
<
2017/11/27
At their heart, many critical systems and system infrastructures are composed of real-time and embedded systems (RTES). For example, RTES control our power grids, maintain our smart homes, steer our v...
《单片机与嵌入式系统应用》(图)
单片机 嵌入式系统 嵌入式系统
<
2017/6/2
《单片机与嵌入式系统应用》网络版是《单片机与嵌入式系统应用》杂志和《单片机与嵌入式系统应用》杂志社有限公司的官方网站,它包含了杂志过去十年的电子版,有反映嵌入式系统行业资讯的新闻栏目,深入探讨嵌入式系统的技术专栏,国内外专家学者的观点和评论专栏,还有特别针对教育培训的嵌入式系统教育栏目。
为了推进全国嵌入式技术在仪器仪表领域的应用及发展,中国仪器仪表学会嵌入式仪表及系统技术分会将于2017年10月20-22日在安徽省淮南市举行“2017全国嵌入式仪表及系统技术会议”。本次会议由安徽理工大学和上海大学联合承办,该系列会议自2009年以来已成功举办八届,现已成为嵌入式系统及相关领域的专家、学者、业界人士以及研究生进行学术交流、产学互动的重要学术交流会议。
2017第四届国际电力,控制与嵌入式系统会议(2017 4th International Conference on Power, Control & Embedded Systems)
2017 国际电力 控制与嵌入式系统 会议
<
2017/2/14
The Department of Electrical Engineering, MNNIT Allahabad has successfully organized three successive conferences titled "International Conference on Power, Control & Embedded Systems (ICPCES-2010, IC...
2017国际电力与嵌入式驱动控制会议(2017 International Conference on Power and Embedded Drive Control )
2017 国际电力与嵌入式驱动控制 会议
<
2017/2/14
The International Conference on Power and Embedded Drive Control (ICPEDC 2017) will be held at SSN College of Engineering, Chennai, India during 16 - 18 March 2017. Chennai is a traditional but vibran...
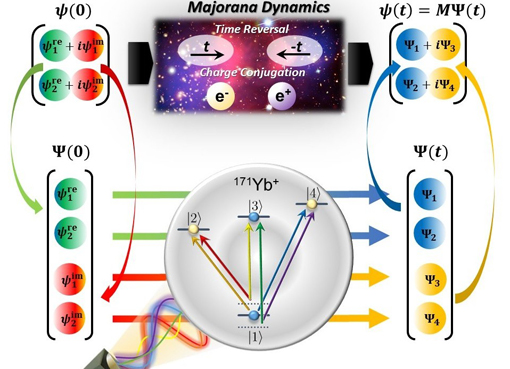
清华大学交叉信息研究院量子信息中心金奇奂研究组在《自然・通讯》发表论文 首次在离子阱系统中实现嵌入式量子模拟器(图)
清华大学交叉信息研究院量子信息中心 金奇奂研究组 自然・通讯 离子阱系统 嵌入式量子模拟器
<
2015/8/10
清华大学交叉信息研究院量子信息中心金奇奂副教授所带领的离子阱研究小组近日首次在离子阱系统中实现了嵌入式量子模拟器。该项研究成果《嵌入式量子模拟器中的时间反演和电荷共轭》(Time Reversal and Charge Conjugation in an Embedding Quantum Simulator)于2015年8月4日发表在《自然・通讯》(Nature Communications)期...
基于嵌入式视觉的子机器人入舱方法
子母式机器人系统 入舱 嵌入式视觉 水平颜色交界线成像斜率 视偏角
<
2016/1/5
提出一种基于嵌入式视觉的子机器人入舱方法, 用于子母式机器人系统中对子机器人的回收. 子机器人基于自身嵌入式平台捕获和处理入口处的引导标识图像, 根据局部颜色排布特征快速提取出标识中心, 利用最小二乘法拟合水平颜色交界线的成像斜率, 基于成像斜率-视偏角模型判别出子机器人航向与入口平面的法线关系, 从而进行运动决策使二者重合以完成入舱. 该方法无需摄像头标定和航迹测量即可准确入舱, 仿真实验验证了...
援潜救生钟嵌入式控制系统设计
VxWorks实时调度 嵌入式控制系统 通信模块 控制总线
<
2014/4/2
对VxWorks嵌入式操作系统在援潜救生钟控制系统中的应用进行了研究,完成了救生钟显控子系统的软硬件设计。采用VxWorks的二进制信号量进行tProcess任务和定时器中断服务程序之间的同步,实现系统运行的实时性与可靠性,满足了救生钟控制系统的性能要求。水池试验和海上试验证明, VxWorks 操作系统在救生钟控制系统上的应用达到了预期的目标,控制功能实现良好,数据通信实时可靠。
针对粮情监控系统性价比低的现状,设计了一种远程粮情监控系统。裁剪并移植了以太网和TCP/IP协议栈,解决了8位微处理器运算速度低、储存容量小等问题;并通过重构嵌入式Web服务器和嵌入式网关来支撑操作系统。系统采用二进制移位和软件滤波算法实现了数据处理;采用字符储存和替换技术实现了嵌入式动态Web页面。实际测试表明,系统运行稳定可靠,具有较好应用前景和推广价值。
精准农业嵌入式Web服务器的实现
嵌入式系统 ARM9Web服务器 嵌入式 Linux 工业以太网A/D
<
2014/4/3
对基于ARM9的农田信息在线监测系统进行了研究。系统采用S3C2410X微处理器作为精准农业嵌入式Web服务器的核心,通过工业以太网并辅助GPRS无线网络,实现各细分地块中农田信息与上位机的交互,以及农田现场各执行器动作的远程控制。Web服务器实现了农田信息的远程查询、上位机命令的解释执行以及农田信息的本地化人机交互等功能。实际测试结果表明,该系统具有监测精度高、适应性好、成本低、运行稳定可靠等优...
高解析喷码机嵌入式系统的设计与实现
高解析喷码机 流式驱动 WinCEARM9SPI 总线图像处理
<
2014/4/3
早期喷码机中,装有Windows操作系统的上位机将处理后的数据传递给下位机,造成喷码机系统庞大复杂,效率低下。对此,采用基于WinCE和ARM9的喷码机系统,选用XJ128按需喷印喷头进行硬件设计。系统将ARM9强大的数据处理能力和WinCE良好的实时性和可剪裁性的优点相结合,集数字图像处理与SPI总线数据传输于一体,通过编写应用程序和分层流式驱动提供喷码机所需信号,大大提高了喷码效率,减小了喷码...