
ЫбЫїНсЙћ: 1-8 ЙВВщЕНЁАСЌајЬхЛњЦїШЫЁБЯрЙиМЧТМ8Ьѕ . ВщбЏЪБМф(0.202 Уы)

ЫежнДѓбЇЛњЕчЙЄГЬбЇдКбЇЪѕБЈИцЃКУцЯђЮЂДДЪжЪѕЕФСЌајЬхЛњЦїШЫЯЕЭГЃЈЭМЃЉ
ЫежнДѓбЇ ЛњЕчбЇдК бЇЪѕБЈИц ЮЂДДЪжЪѕ ЛњЦїШЫЯЕЭГ
<
2024/2/3
ЮЂДДЁЂЮоДДЃЌЪЧЯжДњЭтПЦЪжЪѕЕФзмЬхЗЂеЙЧїЪЦЁЃЮЂДДЪжЪѕЛњЦїШЫВЛНіШУЭтПЦвНЩњИќКУЕиПижЦЪжЪѕЦїаЕЁЂЙлВьВЁдюМАЪжЪѕВПЮЛЃЌЛЙФмНЕЕЭвНЩњЦЃРЭЃЌМѕЩйЪжЪѕЪЇЮѓЁЃБОБЈИцСЂзуСйДВашЧѓЃЌЪзЯШДгЯЕЭГбнНјЕФНЧЖШНщЩмЮЂДДЪжЪѕЛњЦїШЫЕФЗЂеЙЃЌзмНсИїРрЪЙФмММЪѕЕФЬиЕуЁЃЦфДЮЃЌжиЕуЗжЮіСЌајЬхЪжЪѕЛњЦїШЫММЪѕЕФСйДВгІгУбаОПЃЌЬсГіСЫСЌајадЪжЪѕЛњЦїШЫЯЕЭГПђМмЭМЁЃзюКѓЃЌБЈИцШЫНщЩмдкСЌајЬхЪжЪѕЛњЦїШЫСьгђЕФДДаТГЩЙћЃЌВЂЯъЯИНщЩмзюаТЗЂБэЕФМИЦЊТлЮФЕФбаОП...
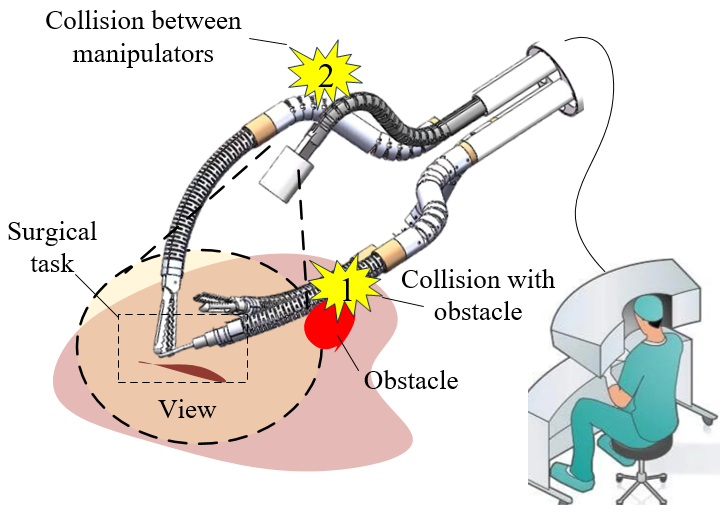
2023Фъ12дТ28ШеЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљСѕКЦбаОПдБгыгбвъвНдКеХжвЬЮНЬЪкдкСЌајЬхЛњЦїШЫЕФжїЖЏБмеЯПижЦЗНУцбаОПШЁЕУаТНјеЙЃЌЯрЙиГЩЙћвдActive collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgeryЮЊЬтдкThe International Jo...
жаЙњПЦбЇдКФўВЈВФСЯММЪѕгыЙЄГЬбаОПЫљдкЩўЧ§ЖЏСЌајЬхЛњЦїШЫИажЊгУРрЦЄЗєЫЎФ§НКДЋИаЦїбаОПжаЛёНјеЙЃЈЭМЃЉ
ЩўЧ§ЖЏСЌајЬх ЛњЦїШЫ ИажЊгУРрЦЄЗє ЫЎФ§НКДЋИаЦї
<
2022/9/14
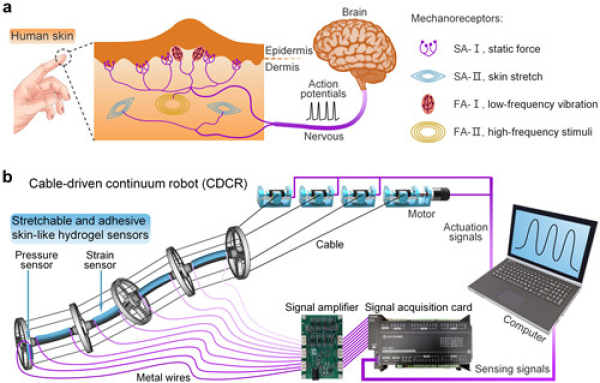
ЩўЧ§ЖЏСЌајЬхЛњЦїШЫЃЈCDCRЃЉЪЧживЊЕФШэЬхЛњЦїШЫЃЌОпгаНсЙЙЧсЧЩЁЂАВШЋКЭздгЩЖШИпЕШЬиЕуЃЌФмЙЛЛљгкЦфздЩэЕФШсадКЭПЩРЩьадВњЩњДѓЗљЖШЭфЧњЁЂХЄзЊБфаЮЕШЖЏзїЃЌвђДЫЫќПЩдкЯСеКЭИДдгЕФЛЗОГжаКмКУЕиЙЄзїЁЃФПЧАЃЌCDCRЯЕЭГжаГЃгУЕФЙтЯЫВМРИёЙтеЄДЋИаЦїФЃСПИпЁЂЩьГЄТЪМЋЕЭЁЂШБЗІеГИНЛњжЦЃЌЯожЦСЫШэЬхЛњЦїШЫЕФдЫЖЏЧввзгыЛњЦїШЫЗжВуЃЌетЪЙетжжИеадЕФДЋИаЦїВЛЪЪКЯМЏГЩЯЕЭГЁЃШчКЮЩшМЦШсадПЩ№ЄИНДЋИаЦїЃЌгУгкCDCRЕФздИажЊМАЦфдЫЖЏМр...
жаПЦдКЩЯКЃЗждКФўВЈВФСЯЫљдкЩўЧ§ЖЏСЌајЬхЛњЦїШЫИажЊгУРрЦЄЗєЫЎФ§НКДЋИаЦїШЁЕУНјеЙ(ЭМ)
ФўВЈВФСЯЫљ ЛњЦїШЫИажЊ ЦЄЗєЫЎФ§НК ДЋИаЦї
<
2022/12/19
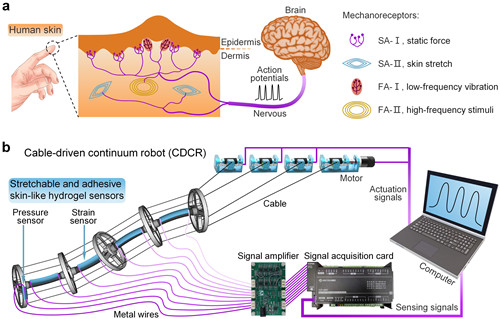
ЩўЧ§ЖЏСЌајЬхЛњЦїШЫЃЈCDCRЃЉЪЧвЛжжЗЧГЃживЊЕФШэЬхЛњЦїШЫЃЌОпгаНсЙЙЧсЧЩЁЂАВШЋКЭздгЩЖШИпЕШЬиЕуЃЌФмЙЛЛљгкЦфздЩэЕФШсадКЭПЩРЩьадВњЩњДѓЗљЖШЭфЧњЁЂХЄзЊБфаЮЕШЖЏзїЃЌвђДЫЫќПЩвддкЯСеКЭИДдгЕФЛЗОГжаКмКУЕиЙЄзїЁЃШЛЖјФПЧАCDCRЯЕЭГжаГЃгУЕФЙтЯЫВМРИёЙтеЄДЋИаЦїФЃСПИпЃЌЩьГЄТЪМЋЕЭЃЌШБЗІеГИНЛњжЦЃЌМЋДѓЕиЯожЦСЫШэЬхЛњЦїШЫЕФдЫЖЏВЂШнвзгыЛњЦїШЫЗжВуЃЌетЪЙЕУетжжИеадЕФДЋИаЦїВЛЪЪКЯМЏГЩЯЕЭГЁЃШчКЮЩшМЦШсадПЩ№ЄИНДЋИаЦїЃЌгУгкCD...

ФўВЈВФСЯЫљдкЩўЧ§ЖЏСЌајЬхЛњЦїШЫИажЊгУРрЦЄЗєЫЎФ§НКДЋИаЦїШЁЕУНјеЙЃЈЭМЃЉ
ЛњЦїШЫИажЊ ЦЄЗє ЫЎФ§НКДЋИаЦї
<
2023/7/13
ЩўЧ§ЖЏСЌајЬхЛњЦїШЫЃЈCDCRЃЉЪЧвЛжжЗЧГЃживЊЕФШэЬхЛњЦїШЫЃЌОпгаНсЙЙЧсЧЩЁЂАВШЋКЭздгЩЖШИпЕШЬиЕуЃЌФмЙЛЛљгкЦфздЩэЕФШсадКЭПЩРЩьадВњЩњДѓЗљЖШЭфЧњЁЂХЄзЊБфаЮЕШЖЏзїЃЌвђДЫЫќПЩвддкЯСеКЭИДдгЕФЛЗОГжаКмКУЕиЙЄзїЁЃШЛЖјФПЧАCDCRЯЕЭГжаГЃгУЕФЙтЯЫВМРИёЙтеЄДЋИаЦїФЃСПИпЃЌЩьГЄТЪМЋЕЭЃЌШБЗІеГИНЛњжЦЃЌМЋДѓЕиЯожЦСЫШэЬхЛњЦїШЫЕФдЫЖЏВЂШнвзгыЛњЦїШЫЗжВуЃЌетЪЙЕУетжжИеадЕФДЋИаЦїВЛЪЪКЯМЏГЩЯЕЭГЁЃШчКЮЩшМЦШсадПЩ№ЄИНДЋИаЦїЃЌгУгкCD...

жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкСЌајЬхЛњЦїШЫаЮзДИажЊбаОПЗНУцШЁЕУНјеЙЃЈЭМЃЉ
СЌајЬх ЛњЦїШЫ аЮзДИажЊ ЧЛОЕЪжЪѕЛњЦїШЫ
<
2022/9/22
НќШеЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљжЧФмЧЛОЕЪжЪѕЛњЦїШЫбаОПзщдкСЌајЬхЛњЦїШЫаЮзДИажЊЗНУцбаОПШЁЕУаТНјеЙЁЃЯрЙиГЩЙћЗЂБэдкЛњЦїШЫСьгђЦкПЏIEEE Robotics and Automation LettersЩЯЁЃ
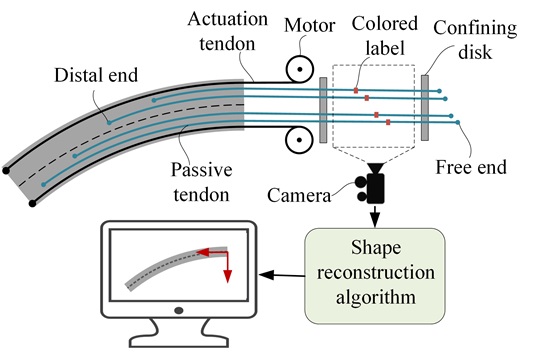
жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкСЌајЬхЛњЦїШЫаЮзДИажЊЗНУцбаОПШЁЕУНјеЙЃЈЭМЃЉ
СЌајЬхЛњЦїШЫ аЮзДИажЊ БеЛЗПижЦ жЧФмЛЏгІгУ
<
2022/4/20
НќШеЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљжЧФмЧЛОЕЪжЪѕЛњЦїШЫбаОПзщдкСЌајЬхЛњЦїШЫаЮзДИажЊЗНУцбаОПШЁЕУаТНјеЙЁЃЯрЙиГЩЙћвдShape Sensing for Continuum Robots by Capturing Passive Tendon Displacements with Image SensorsЮЊЬтЗЂБэдкЛњЦїШЫСьгђЦкПЏIEEE Robotics and Automation LettersЁЃСЌај...
жаЙњПЦбЇдКФўВЈВФСЯММЪѕгыЙЄГЬбаОПЫљаТаЭЩўЧ§ЖЏСЌајЬхЛњЦїШЫбаОПШЁЕУНјеЙЃЈЭМЃЉ
ЩўЧ§ЖЏСЌајЬхЛњЦїШЫбаОПШЁЕУНјеЙ
<
2021/3/8
жаЙњПЦбЇдКФўВЈВФСЯММЪѕгыЙЄГЬбаОПЫљОЋУмЧ§ЖЏгыЛњЦїШЫЭХЖгРћгУСЫЩўЫїЕФИпаЇСІДЋЕМвдМАОпгаБОжЪШсадЕФЬиЕуЃЌбаЗЂСЫОпгаЖрИіЙиНкФЃПщЕФЩўЫїЧ§ЖЏСЌајЬхЛњЦїШЫБлЃЌЩўЧ§ЖЏЛњЦїШЫБлВЩгУЖрИљЧсжЪЩўЫїаЭЌЧ§ЖЏЃЌгыДЋЭГжїЖЏЙиНкЧ§ЖЏЕФЛњЦїШЫБлВЛЭЌЃЌЩўЧ§ЖЏЛњЦїШЫБлЪЧгЩБЛЖЏЙиНкжЇГХЃЌжїЖЏЩўЫїЧ§ЖЏЃЌгЩгкжїЖЏЩўЫїЕФЧ§ЖЏзАжУШЋЖМАВзАдкЛњзљЩЯЃЌвђДЫЩўЧ§ЖЏЛњЦїШЫБлОпгазджиЧсЁЂзЊЖЏЙпСПаЁКЭвзгкЪЕЯжБфИеЖШПижЦЕШгХЕуЃЌМШФмЙЛВњЩњБОжЪАВШЋЕФдЫЖЏ...
жаЙњбаОПЩњНЬг§ХХааАё-Ьѕ
- е§дкМгди...
жаЙњбЇЪѕЦкПЏХХааАё-Ьѕ
- е§дкМгди...
ЪРНчДѓбЇПЦбаЛњЙЙХХааАё-Ьѕ
- е§дкМгди...
жаЙњДѓбЇХХааАё-Ьѕ
- е§дкМгди...
ШЫЁЁЮя-ЦЊ
- е§дкМгди...
ПЮЁЁМў-ЦЊ
- е§дкМгди...
ЪгЬ§зЪСЯ-ЦЊ
- е§дкМгди...
баеазЪСЯ -ЦЊ
- е§дкМгди...
жЊЪЖвЊЮХ-ЦЊ
- е§дкМгди...
ЙњМЪЖЏЬЌ-ЦЊ
- е§дкМгди...
ЛсвщжааФ-ЦЊ
- е§дкМгди...
бЇЪѕжИФЯ-ЦЊ
- е§дкМгди...
бЇЪѕеОЕу-ЦЊ
- е§дкМгди...