
搜索结果: 256-270 共查到“知识要闻 机器人控制”相关记录720条 . 查询时间(1.765 秒)

连续多视角任务学习让机器人“更快”认知不同的世界(图)
多视角 任务学习 机器人 不同的世界
<
2020/4/1
为解决现存大部分的多视角任务学习模型不能快速学习新任务的问题,中国科学院沈阳自动化研究所机器人学研究室科研团队提出了一种连续多视角任务学习算法,可使机器人“更快”地认知世界。相关成果以Continual Multiview Task Learning via Deep Matrix Factorization为题发表于中科院一区期刊IEEE TRANSACTIONS ON NEURAL NETWO...
中科院深圳先进技术研究院了解到,该院科研人员研制出一种集运动、变形、变色于一体的多功能微型软体机器人,有望在生物医学、环境监测等领域得到应用。
中科院深圳先进技术研究院科研人员近日研制出一种集运动、变形、变色于一体的多功能微型软体机器人,有望在生物医学、环境监测等领域得到应用。此前,科研人员一直试图研制出能够在复杂环境下执行任务的微型软体机器人。但是,受机器人结构设计与材料性能的影响,部分微型软体机器人功能局限性强,应用场景有限。

近日,中国科学院沈阳自动化研究所参加中国第36次南极科考的姜志斌、孙波顺利返沈。本次科考,“探索1000”自主水下机器人(以下简称“探索1000”)成功完成了南大洋海洋环境自主水下机器人调查任务,为考察队执行罗斯海多环境要素综合调查提供了重要技术支撑。

多孔介质材料让自主水下机器人“游”得更远(图)
多孔介质材料 自主水下机器人 续航能力
<
2020/3/20
近日,中国科学院沈阳自动化研究所科研团队提出了一种可提高自主水下机器人续航力的方法,通过采用多孔介质材料作为耐压壳体表层,降低航行阻力,可使自主水下机器人在外形和电池容量不变的情况下“游”得更远,相关成果发表于 Ocean Engineering。目前,大多数自主水下机器人通过自身携带能源供电,受电池能量密度等因素影响,为提高其续航能力,通常会选择低功耗电子设备、高效推进方法和低阻力外形设计。沈阳...
中国工程院院士钟南山团队等研发咽拭子采样机器人取得进展
钟南山 咽拭子采样 机器人 采样机器人
<
2020/3/10
由中国工程院院士钟南山团队与中国科学院沈阳自动化研究所联合发起的新型智能化咽拭子采样机器人系统研发完成,并在首期临床试验中实现对受试者的有效采样且采样力度均匀,取得阶段性进展。

浙江大学一项新研究提出控制物体的"万能抓手”(图)
浙江大学 控制物体 万能抓手
<
2020/3/9
说到抓取物体的抓手,大家往往就会想到类似人手的机械装置。但事实上,在工业生产、科学研究和日常生活中,“手到擒来”并非易事,抓手的设计常常因物体尺寸、形状、数量规模等特殊要求而变得极具挑战。如何实现抓手万能?近日,浙江大学航空航天学院宋吉舟教授团队,便基于形状记忆聚合物,提出了一种新型的“万能抓手”策略。这个“万能抓手”的载体非常简单,就是一块智能“塑料”。别瞧它结构简单,本领可不小,它可以把目标物...

中国科学院沈阳自动化研究所新型排爆机器人研究取得进展(图)
中国科学院沈阳自动化研究所 新型 排爆机器人 控制算法
<
2020/2/25
近日,中国科学院沈阳自动化研究所研发了一款新型轮―腿―履带复合式排爆机器人Scorpio(天蝎),有效提高了排爆机器人的作业效率和作业能力。

中国科学院沈阳自动化研究所“机器人行为智能”研究取得进展(图)
中国科学院沈阳自动化研究所 机器人 行为智能
<
2020/2/20
中国科学院沈阳自动化研究所研究人员近期提出了一种可提升机器人行为智能的新方法,相关成果发表在 IEEE Transactions on Cognitive and Developmental Systems。
吉林大学人工智能学院助理教授姚美宝的论文An Actuation Fault Tolerance Approach to Reconfiguration Planning of Modular Self-folding Robots近日被CCF-B类会议ICRA 2020接收。ICRA (International Conference on Robotics and Automation)是机器...

中国科学院沈阳自动化研究所水下滑翔蛇形机器人研究取得进展(图)
中国科学院沈阳自动化研究所 水下滑翔 蛇形机器人
<
2020/2/12
近日,中国科学院沈阳自动化研究所研制出一种结合水下滑翔机和水下蛇形机器人特点的水下滑翔蛇形机器人,该机器人可以实现净浮力驱动的滑翔运动和关节力矩驱动的多种游动步态,具有续航能力强和机动强的优点,相关研究成果近期发表于Science China-Information Sciences。

东北大学佛山机器人学院揭牌仪式举行(图)
东北大学佛山机器人学院 揭牌仪式
<
2020/2/17
2020年1月13日,东北大学与广东博智林机器人有限公司签署关于支持东北大学佛山研究生院暨东北大学佛山机器人学院建设的合作协议。东北大学校长赵继,副校长孙雷,佛山市委副书记、顺德区委书记郭文海,碧桂园集团董事局主席杨国强,广东博智林机器人有限公司董事长张瑛,广东省教育厅、佛山市教育局以及东北大学校长办公室、佛山研究生院相关负责人等出席签约仪式和揭牌活动。
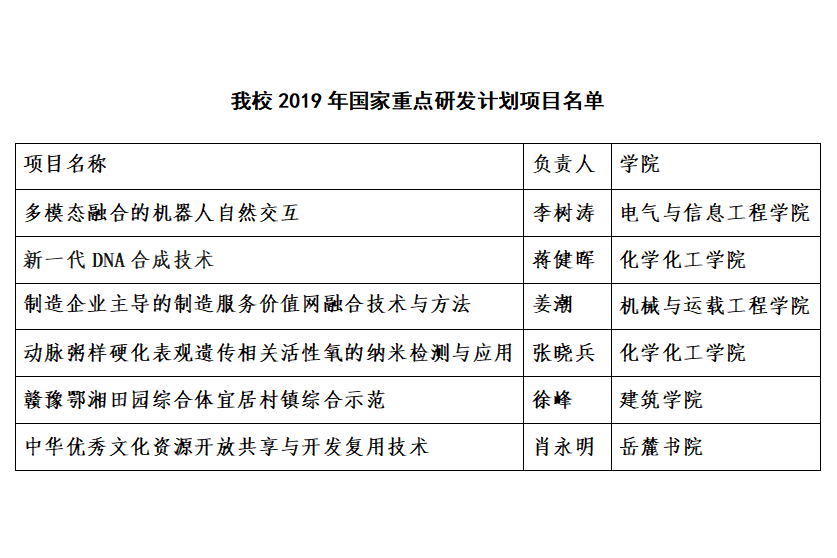
近日,2019年度国家重点研发计划项目和国家科技重大专项课题评审结束,我校李树涛、蒋健晖、姜潮、张晓兵、徐峰、肖永明教授牵头的6个项目获批,较上年增长3项,立项经费达1.08亿。此外,我校主持的13项国家科技重大专项课题获批,立项经费达4979万元。
近日,根据西安市科学技术局《关于批准西安市大数据与人工智能等26家市级重点实验室建设的通知》,我校获批建设“西安市先进控制与智能处理重点实验室”,自动化学院屈军锁教授为项目负责人。先进控制与智能处理重点实验室以先进控制技术、工业机器人技术、信息检测与智能处理为重点研究方向,紧跟先进控制与智能处理相关领域的技术发展动态,结合优势学科,选择对陕西省和西安市产业具有重大效益及应用前景的智能装备控制研究方...

2019年12月23日,由我所承担、谭民研究员任项目负责人的国家重点研发计划“智能机器人”重点专项“新型仿生机器人机构设计理论与技术”,北京同仁医院承担、边桂彬研究员任项目负责人的该专项“眼科显微手术机器人系统研制与临床试验”项目中期检查会在北京召开。科技部高技术研究发展中心、“智能机器人”重点专项总体专家组成员、同行专家和财务专家、中科院自动化所领导、北京同仁医院领导、项目“两组一委”成员以及两...